


ROS Components, porque robótica significa ROS
ROS Components es una división del grupo Robotnik Automation, empresa líder en Robótica de Servicio en Europa. El…
Robotic web applications
ROS is a great tool to develop new robotic applications. Its ease of use and its large amount of tools and wide…

ROS-Industrial, donde se fusiona ROS y el sector industrial
ROS y el software de código abierto han ganado popularidad en los últimos años, principalmente en universidades y…
La realidad aumentada entra en acción
La Realidad Aumentada (RA) es una visión directa o indirecta en vivo de un entorno físico del mundo real cuyos…

Un nuevo paquete de ROS disponible para la mano de Barrett
Robotnik ha desarrollado un nuevo paquete para ROS para la Barrett Hand BH8-28X que permite el control de la mano…
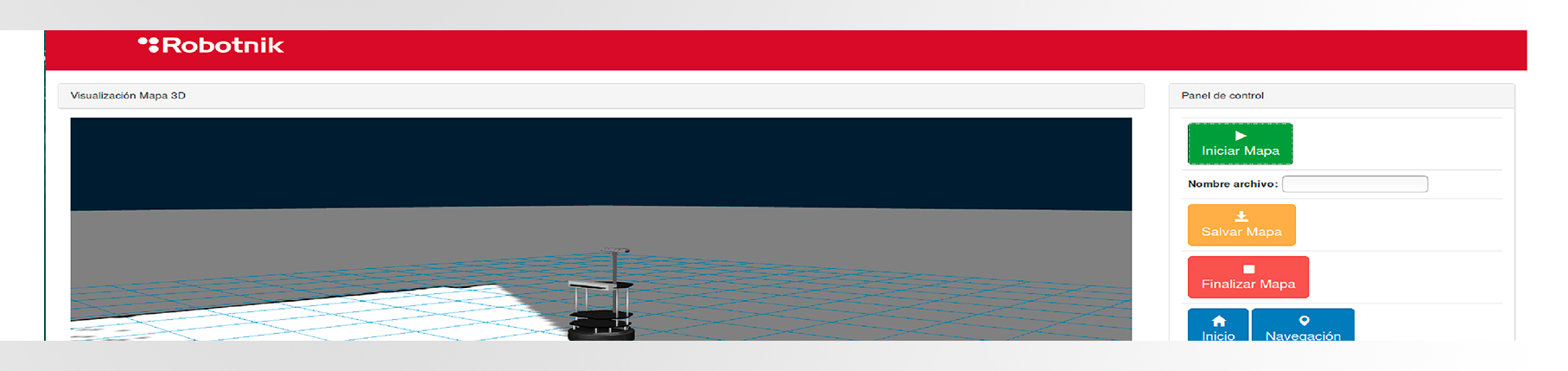
Interfaces de usuario en ROS
A medida que los sistemas robóticos se vuelven más funcionales, la necesidad de utilizar medios para obtener una…

ROS ha cumplido 5 años
ROS cumplió 5 años el pasado Noviembre y no ha dejado de crecer desde sus inicios. Actualmente, hay 175 organizaciones…