

INTREPID
Herramientas inteligentes para reconocimiento y evaluación en situaciones de emergencias
Las organizaciones de atención de emergencias suelen ser las primeras en llegar y brindar asistencia a zonas donde se han producido accidentes, desastres naturales o ataques terroristas. También son las primeras en comunicarse con los supervivientes y tienen que afrontar situaciones desafiantes, peligrosas y agotadoras con un tiempo de respuesta crítico. Una respuesta rápida es clave para salvar vidas y minimizar el daño ambiental. Sin embargo, uno de los mayores problemas a los que se enfrentan durante la fase inicial de la emergencia es la falta de información y recursos fiables.
INTREPID tiene como objetivo aportar nuevas soluciones a las operaciones de primeros auxilios en las primeras fases de un desastre, cuando las posibilidades de salvar vidas son mayores y las operaciones se ven ralentizadas por muchos tipos de incertidumbres. Cuando el tiempo de respuesta es crítico, la conciencia de la situación es vital para tomar decisiones inteligentes. Por ello, INTREPID pretende proporcionar a estas organizaciones de socorristas un nuevo enfoque para acelerar la exploración y evaluación de sitios peligrosos, permitiendo una respuesta rápida y eficaz.
Para lograr este objetivo, INTREPID desarrollará y validará una plataforma de vanguardia, fácil de implementar y fácil de usar, que permitirá a los socorristas explorar la escena de forma segura, analizar y evaluar las amenazas existentes y decidir, basándose en una información fiable de la situación, los próximos pasos a seguir. Para explorar el área, INTREPID utilizará asistentes cibernéticos (vehículos autónomos inteligentes) para mejorar la velocidad, el alcance y la eficacia de la exploración de sitios complejos. Para evaluar el estado actual de la situación, INTREPID recopilará y combinará los datos obtenidos por los asistentes cibernéticos, los socorristas y el centro de comando utilizando algoritmos de Inteligencia Artificial. La información obtenida se presentará de forma clara y concisa utilizando dispositivos de Realidad Aumentada, mejorando el conocimiento de la situación. Para ayudar con la toma de decisiones, INTREPID utilizará algoritmos de aprendizaje profundo para proporcionar orientación y alertas.
Para garantizar una operación segura, la plataforma INTREPID utilizará un sistema de posicionamiento innovador que permitirá la localización precisa de los socorristas y asistentes cibernéticos. La plataforma también incluirá un sistema de red robusto y seguro para permitir la comunicación en tiempo real con el centro de comando.
El resultado es una respuesta inmediata y específica que permitirá operaciones más rápidas, efectivas y seguras.
ROBOTNIK EN EL PROYECTO
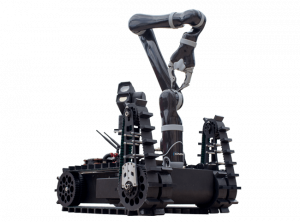
Robotnik en el proyecto es el responsable de diseñar y desarrollar un vehículo terrestre no tripulado inteligente (UGV) capaz de realizar misiones de exploración a través de terrenos accidentados o ubicaciones interiores complejas. El objetivo de la solución robótica móvil es recopilar y enviar datos de misión en tiempo real obtenidos de cámaras y otros sensores integrados en el robot. El vehículo robótico, un RB-VOGUI-6, debe operar en condiciones exteriores extremas y debe poder cubrir grandes extensiones de tierra, todo mientras permite comunicaciones en tiempo real con la estación de control.
El proyecto requiere una forma novedosa de UGV inteligente capaz de navegar a través de terrenos al aire libre accidentados en condiciones difíciles, así como explorar ubicaciones interiores complejas, donde debería poder abrir puertas, subir escaleras y usar interruptores para manipular luces o ascensores. El UGV estará diseñado para realizar un escaneo del área incluso cuando se enfrente a situaciones de baja visibilidad (humo, ubicaciones en interiores, etc.). El UGV también actuará como portador y base de carga para los UAV INTREPID que se utilizarán para la exploración.
Para cumplir con todos los requisitos, INTREPID propone una importante solución revolucionaria que implica equipar la plataforma UGV con cuatro patas robotizadas 5DoF plegables sobre ruedas, lo que permite que el UGV ruede, camine, gatee y suba escaleras y obstáculos. El UGV contará con una arquitectura abierta y un sistema de control modular que puede admitir el plug-and-play de diferentes sensores utilizados para evaluar la situación, como láseres, cámaras o sensores CNRBe. La UGV estará equipada con un brazo robótico, con el que podrá realizar tareas de manipulación.
Robotnik también contribuirá al desarrollo de un módulo controlador de operación simbiótica que controlará la operación conjunta del UGV y los UAV para realizar tareas colaborativas.


Socios del proyecto





Ver más proyectos