MUPPET
Integrated Teleoperation Systems for Connected Intelligent Vehicles
MUPPET (Integrated Teleoperation Systems for Connected Intelligent Vehicles) is a collaborative project between Brainstorm Multimedia and Robotnik, aimed at designing, studying, and validating a robust, modular, distributed, and open teleoperation architecture for connected vehicles.
The solution is based on ROS 2 and focuses on efficiently integrating an advanced remote driving station featuring immersive interfaces, optimized usability, and operational realism with a physical buggy-type vehicle equipped with advanced sensing and telemetry.
The system is designed to operate over conventional wireless networks (4G/5G/6G) and enables the analysis of resilience strategies against latency, jitter, or connectivity loss, ensuring safe, real-time interaction.
Validation will be conducted in controlled, representative scenarios, resulting in a platform transferable to multiple use cases, such as logistics, inspection, surveillance, or training.
ROBOTNIK AT THE PROJECT
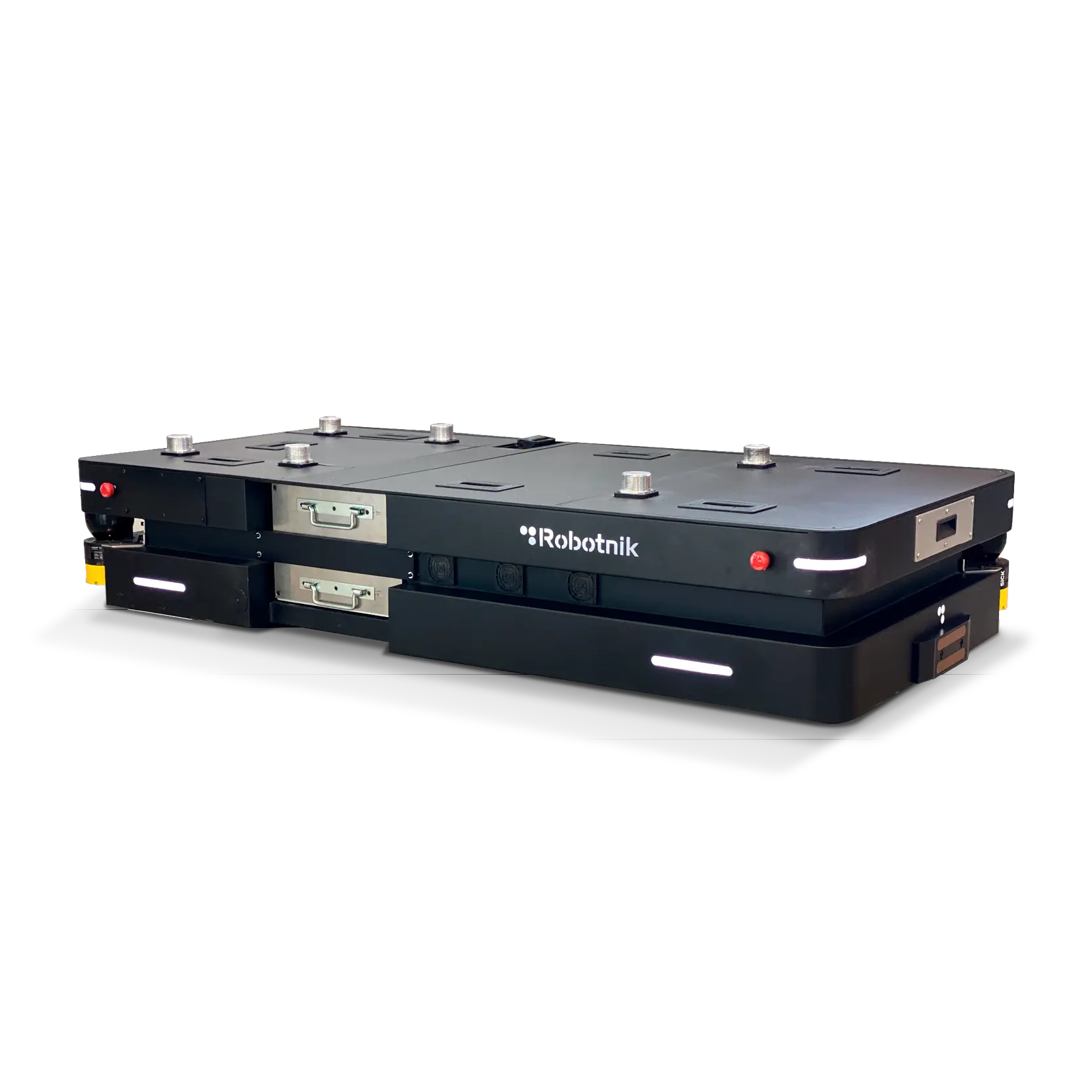
Robotnik leads the “connected vehicle” pillar of the project, responsible for adapting a buggy for integration into MUPPET’s distributed architecture. Its responsibilities include the selection and integration of sensors (cameras, LiDAR, IMU, GNSS), the design of the embedded hardware/software architecture, the deployment of ROS 2 nodes, and the implementation of a distributed hierarchical control system that ensures safe operation even under network degradation.
Additionally, Robotnik is responsible for developing and validating resilient communication strategies and actively participates in the integration and experimental testing of the complete system in controlled and representative environments.

Project partners





More projects
MUPPET