

ROBORDER
Sistemas robóticos para el control y vigilancia de fronteras
Las autoridades de control de fronteras europeas (LEA, por sus siglas en inglés) se enfrentan a desafíos importantes relacionados con la forma en que patrullan y protegen dichas fronteras. Su trabajo cada vez es más complicado debido a la heterogeneidad de las amenazas, la amplitud del área que abarcan, las condiciones climáticas adversas y la amplia variedad de terrenos.
Aunque actualmente existen varias herramientas que actúan de forma independiente para la vigilancia fronteriza, hoy en día las autoridades fronterizas no tienen acceso a una solución holística inteligente que brinde todas las funcionalidades mencionadas anteriormente.
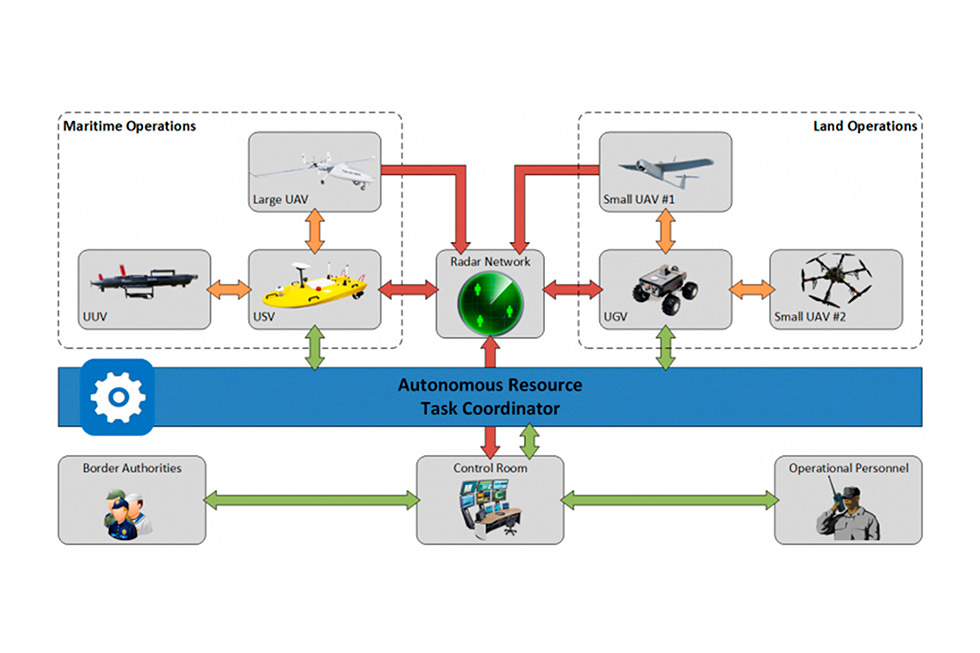
Para ofrecer una solución de este tipo, ROBORDER tiene como objetivo desarrollar y demostrar un sistema de vigilancia fronteriza autónomo completamente funcional con robots móviles no tripulados, incluidos vehículos aéreos, de superficie acuática, submarinos y terrestres, capaces de funcionar tanto en forma independiente como en enjambres, que incorporarán sensores multimodales como parte de una red interoperable.
El sistema estará equipado con sensores adaptables y tecnologías robóticas que pueden operar en una amplia gama de entornos operativos y ambientales. La red de sensores incluirá sensores en red estáticos, como radares de vigilancia fronteriza, así como sensores móviles personalizados e instalados a bordo de vehículos no tripulados.
Para tener éxito en la implementación de una solución operativa, también se aplicarán una serie de tecnologías complementarias que permitirán el establecimiento de enlaces de comunicación robustos entre la unidad de comando y control y los robots heterogéneos.
Además de esto, se pretende mejorar la identificación temprana de actividades delictivas e incidentes peligrosos. Esta información se enviará a la unidad de comando y control que permitirá la integración de grandes volúmenes de datos de sensores heterogéneos y la provisión de una visión general rápida de la situación de un vistazo a los operadores, apoyándolos en sus decisiones.
ROBOTNIK EN EL PROYECTO
Robotnik, como proveedor de hardware, está desarrollando un nuevo concepto de UGV (vehículo terrestre no tripulado) capaz de desplegar de forma autónoma un pequeño UAV (vehículo aéreo no tripulado). El despliegue se realiza de dos maneras:
● Modo atado, donde el UAV permanece conectado al UGV a través de un cable que le permite que el UAV se cargue, lo que le proporciona un tiempo de vuelo ilimitado.
● Modo de vuelo libre, donde el UAV se implementa sin ninguna conexión con el UGV pero una plataforma de carga autónoma le permite recargar las baterías una vez aterrice en el mismo.
El UGV está equipado con sensores y actuadores que le permiten navegar de forma autónoma y llevar a cabo una eficiente vigilancia de fronteras, que además se ha reforzado para operar en condiciones ambientales adversas. El UGV está conectado a una estación de control de tierra (GCS) que proporciona monitoreo remoto, teleoperación y comando del vehículo.


Socios del proyecto



















Ver más proyectos
