UP TO 1.750 KG OF PAYLOAD
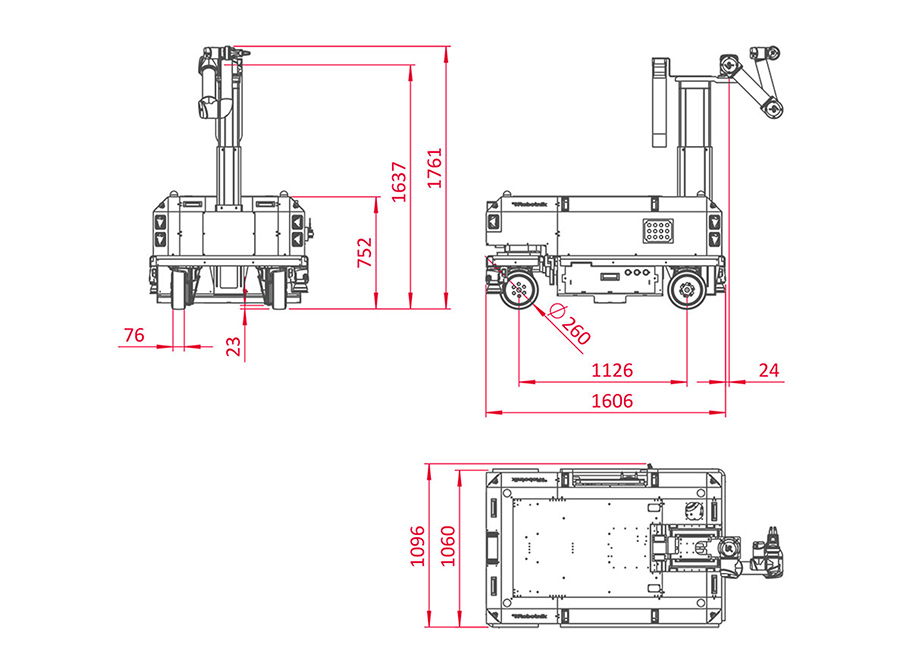
Z-AXIS EXTENDED ARM WORKSPACE OPTION
SECURITY SENSORIZATION
OPTIONAL BATTERIES EXCHANGE SYSTEM


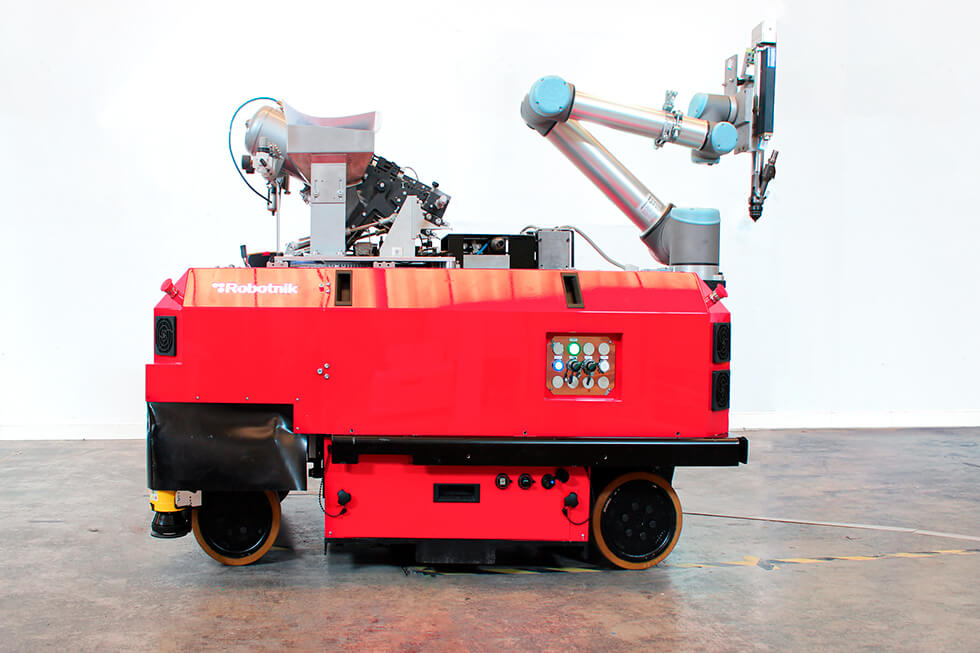
Collaborative Mobile Manipulator
Mobile manipulator RB-VULCANO is completely autonomous and collaborative, and can share workspace with people safely by means of its integrated lasers. In addition, it is a highly maneuverable platform thanks to its wheels with infinite rotation.
The robot RB-VULCANO consists of a base and a lift column and a UR5 arm (payload of 5 kg), UR10 (payload 12,5 kg) or UR16 (payload 16 kg). By default, it has integrated collaborative gripper 40 CO-ACT (Schunk) but this can be replaced by any other type of tool (as a screwdriver, for example).
Meanwhile, the robotic arm can perform at different heights. The base of the robotic arm works between 750 mm and 1.500 mm. This allows to either reach objects that are at ground level and up to 3.000 mm high, in the case of RB-VULCANO 10.
The tableboard allows to place objects weighing up to 300 kg. This can be used as a workbench, the mobile manipulator being stationary or in movement.
The robot can incorporate different magnetic navigation systems, SLAM or remotely through a PTZ camera.
Other notable elements of the robot are its fairing, completely removable for easy maintenance and access to electronics; its battery easily interchangeable -with the possibility of acquiring a charging station with automatic exchange of battery- and easy integration of additional components in its interior.
TECHNICAL SPECIFICATIONS
MECHANICAL
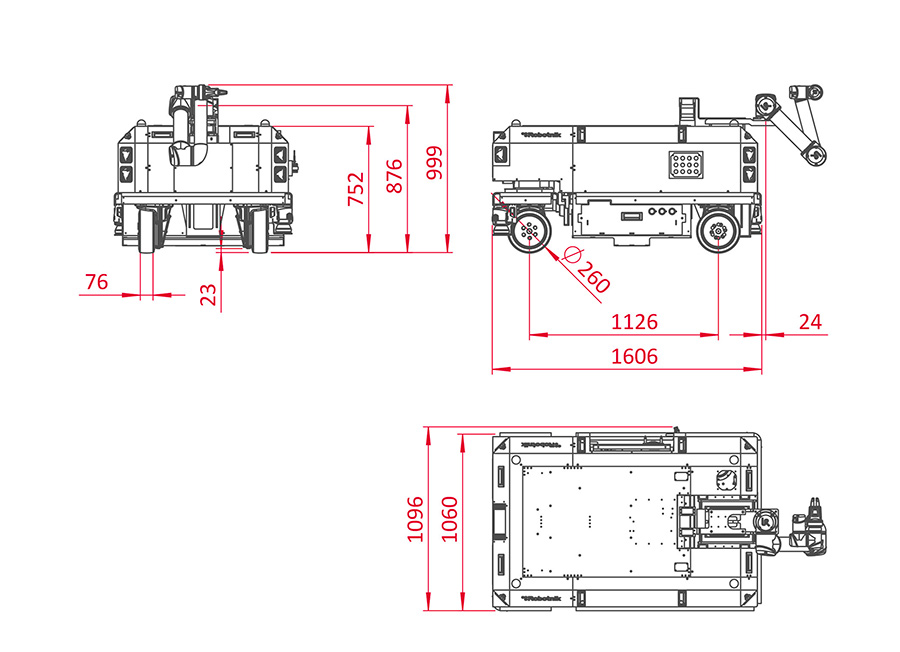
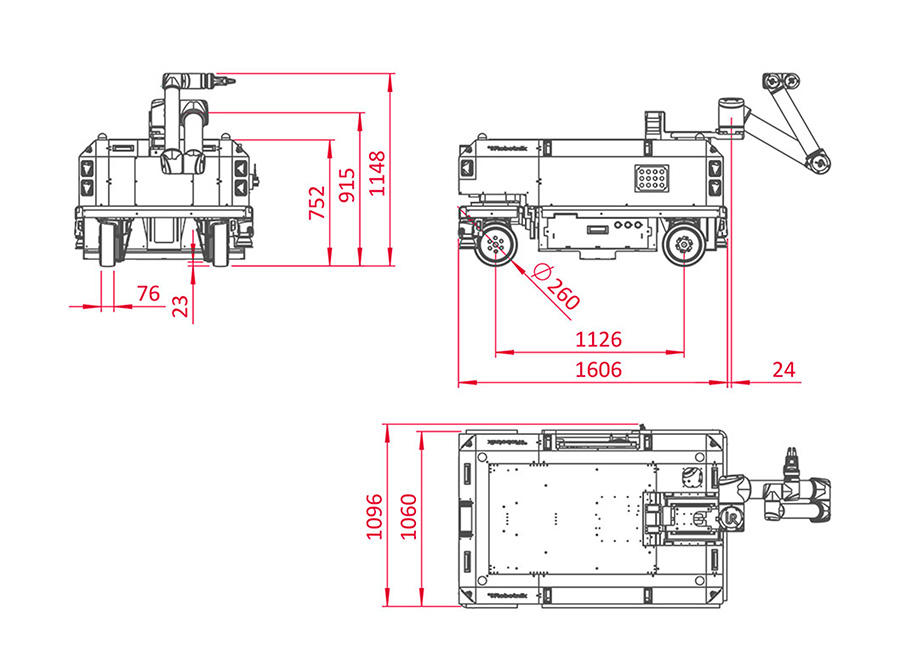
- Dimensions (folded): 1.606 x 1.096 x 999 mm
- Weight: 850 kg
- Base payload: Up to 1.750 kg
- Arm payload: 5 kg
- Speed: 1 m/s
- Environment: Indoor
- Protection: IP21
- Traction motors: 4 x 1200 W
- Traction system: Single Ackermann/ Dual Ackermann/ Omni-drive (swerve drive)
- Temperature range: 0ºC to +45ºC
COMMUNICATION
- WiFi 802.11 n
CONNECTIVITY
- On demand
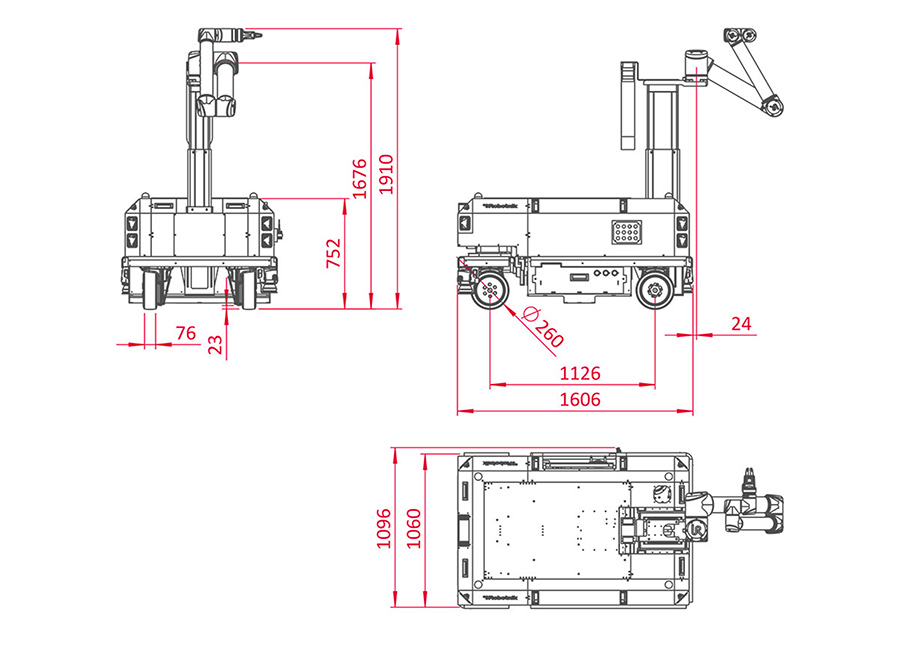
BLUEPRINTS
Collaborative Mobile Manipulator
Mobile manipulator RB-VULCANO is completely autonomous and collaborative, and can share workspace with people safely by means of its integrated lasers. In addition, it is a highly maneuverable platform thanks to its wheels with infinite rotation.
The robot RB-VULCANO consists of a base and a lift column and a UR5 arm (payload of 5 kg), UR10 (payload 12,5 kg) or UR16 (payload 16 kg). By default, it has integrated collaborative gripper 40 CO-ACT (Schunk) but this can be replaced by any other type of tool (as a screwdriver, for example).
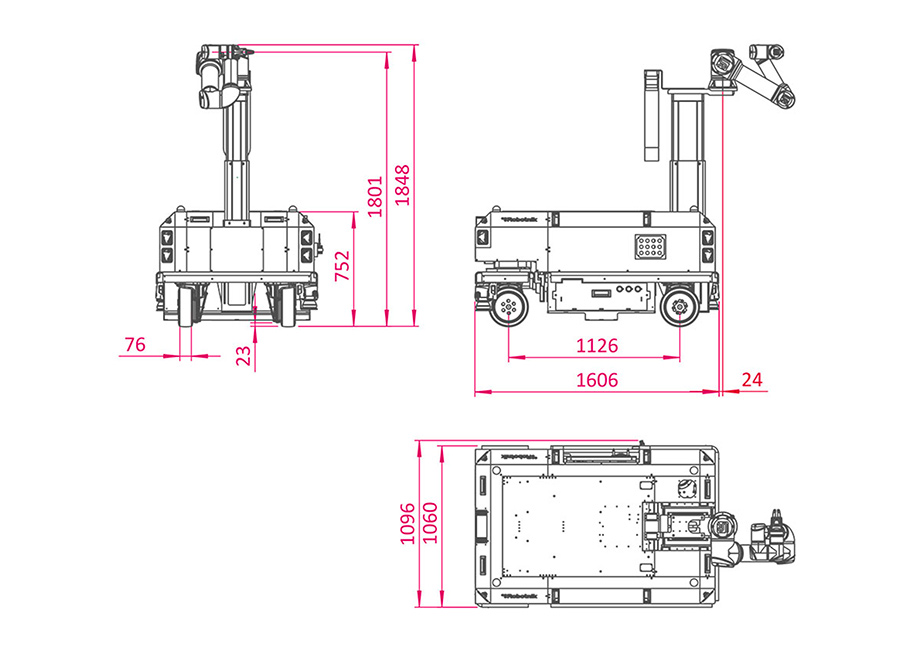
Meanwhile, the robotic arm can perform at different heights. The base of the robotic arm works between 750 mm and 1.500 mm. This allows to either reach objects that are at ground level and up to 3.000 mm high, in the case of RB-VULCANO 10.
The tableboard allows to place objects weighing up to 300 kg. This can be used as a workbench, the mobile manipulator being stationary or in movement.
The robot can incorporate different magnetic navigation systems, SLAM or remotely through a PTZ camera.
Other notable elements of the robot are its fairing, completely removable for easy maintenance and access to electronics; its battery easily interchangeable -with the possibility of acquiring a charging station with automatic exchange of battery- and easy integration of additional components in its interior.
TECHNICAL SPECIFICATIONS
MECHANICAL
- Dimensions (folded): 1.606 x 1.096 x 1.148 mm
- Weight: 850 kg
- Base payload: Up to 1.750 kg
- Arm payload: 12,5 kg
- Speed: 1 m/s
- Environment: Indoor
- Protection: IP21
- Traction motors: 4 x 1200 W
- Traction system: Single Ackermann/ Dual Ackermann/ Omni-drive (swerve drive)
- Temperature range: 0ºC to +45ºC
COMMUNICATION
- WiFi 802.11 n
CONNECTIVITY
- On demand
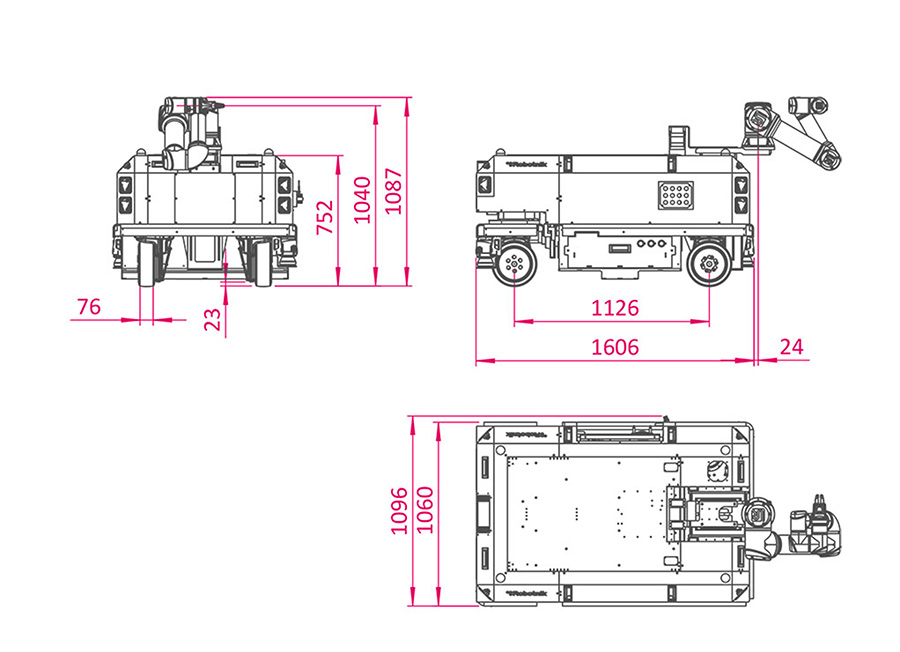
BLUEPRINTS
Collaborative Mobile Manipulator
Mobile manipulator RB-VULCANO is completely autonomous and collaborative, and can share workspace with people safely by means of its integrated lasers. In addition, it is a highly maneuverable platform thanks to its wheels with infinite rotation.
The robot RB-VULCANO consists of a base and a lift column and a UR5 arm (payload of 5 kg), UR10 (payload 12,5 kg) or UR16 (payload 16 kg). By default, it has integrated collaborative gripper 40 CO-ACT (Schunk) but this can be replaced by any other type of tool (as a screwdriver, for example).
Meanwhile, the robotic arm can perform at different heights. The base of the robotic arm works between 750 mm and 1.500 mm. This allows to either reach objects that are at ground level and up to 3.000 mm high, in the case of RB-VULCANO 10.
The tableboard allows to place objects weighing up to 300 kg. This can be used as a workbench, the mobile manipulator being stationary or in movement.
The robot can incorporate different magnetic navigation systems, SLAM or remotely through a PTZ camera.
Other notable elements of the robot are its fairing, completely removable for easy maintenance and access to electronics; its battery easily interchangeable -with the possibility of acquiring a charging station with automatic exchange of battery- and easy integration of additional components in its interior.
TECHNICAL SPECIFICATIONS
MECHANICAL
- Dimensions (folded): 1.606 x 1.096 x 1.087 mm
- Weight: 850 kg
- Base payload: Up to 1.750 kg
- Arm payload: 16 kg
- Speed: 1 m/s
- Environment: Indoor
- Protection: IP21
- Traction motors: 4 x 1200 W
- Traction system: Single Ackermann/ Dual Ackermann/ Omni-drive (swerve drive)
- Temperature range: 0ºC to +45ºC
COMMUNICATION
- WiFi 802.11 n
CONNECTIVITY
- On demand
BLUEPRINTS
APPLICATIONS
Pick&Place
Part feeding
Industrial applications
R&D