


MOBILE MANIPULATOR WITH INTEGRATED KINOVA ARM
INDOOR & OUTDOOR ENVIRONMENTS
UP TO 5 H OF AUTONOMY


Mobile Robot ideal for R&D applications due its versatility, flexibility and modularity
The RB-SUMMIT Autonomous Mobile Robot is designed to perform a wide range of R&D applications in indoor and especially outdoor environments.
Its versatility, size and high mobility make the RB-SUMMIT useful in all types of terrain for tasks such as logistics, transport or agriculture, with a payload of 50 kg.
This robust and modular multi-purpose mobile platform can navigate autonomously or be teleoperated by means of a Pan-Tilt-Zoom camera that transmits video in real time.
Also available is the RB-SUMMIT+ mobile manipulator, developed from the RB-SUMMIT platform and the Kinova Gen2 Ultra lightweight robot arm.
RB-SUMMIT uses the open and modular architecture based on ROS 2.
TECHNICAL SPECIFICATIONS
MECHANICAL
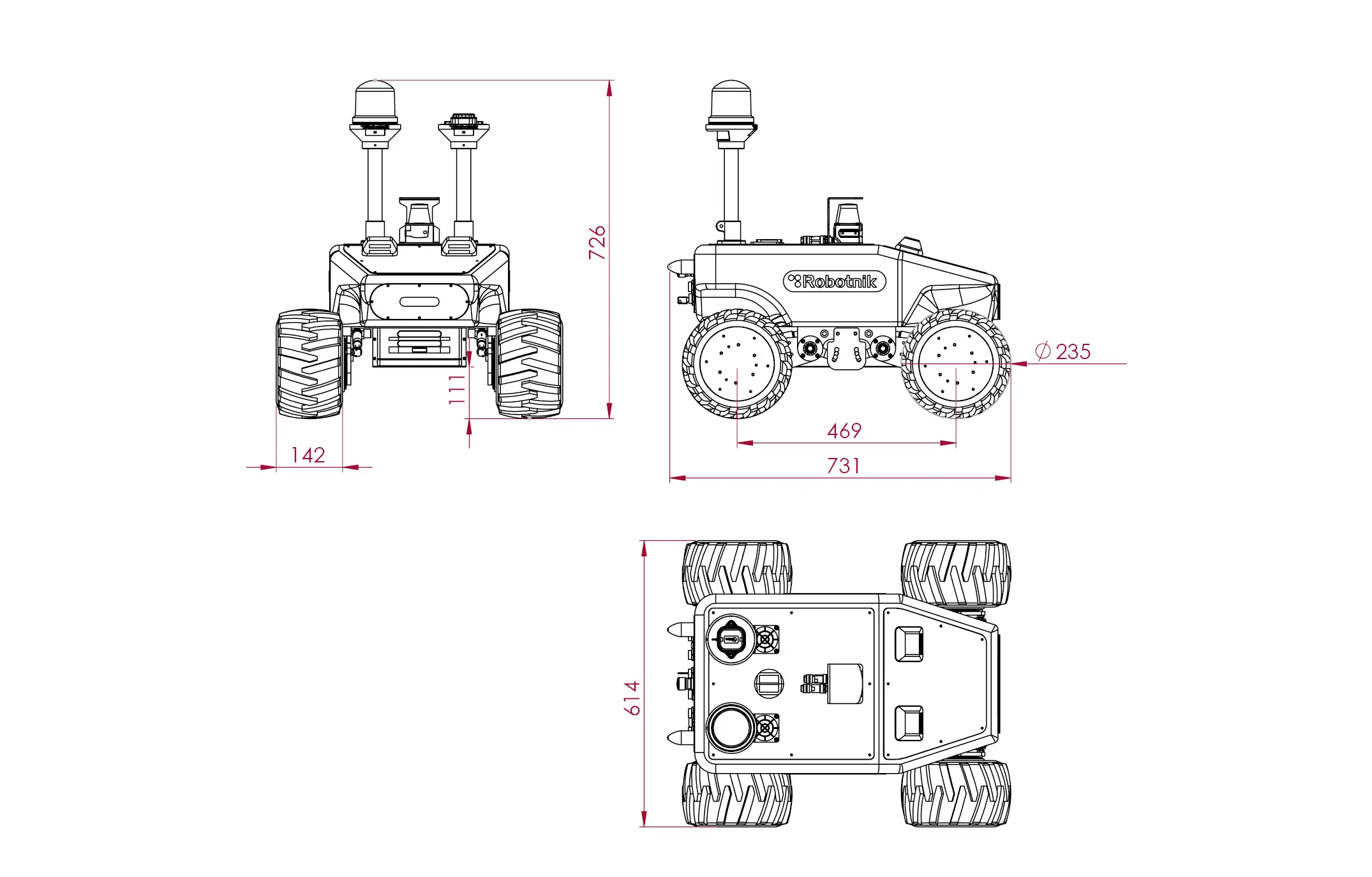
- Dimensions: 731 x 614 x 726 mm
- Weight: 65 kg
- Payload: Up to 50 kg
- Speed: 3 m/s
- Environment: Indoor / Outdoor
- Enclosure class: IP50 / Up to IP54 weatherproof (optional)
- Autonomy: Up to 5 h
- Traction motors: 4 x 500 W with brake
- Kinematics: Skid steering
- Localization system: SLAM
- Temperature range: -10ºC to +45ºC
- Max. slope: 80%
COMMUNICATION
- WiFi 802.11 b/g/n/ac
- Bluetooth 4.0
CONNECTIVITY
- USB x1
- Ethernet x1
- DC Power Output
COMPONENTS
INCLUDED
- CPU Intel i7
- 2D Laser
- RGBD camera
- 5G Router
- IMU
- Battery 48VDC@15Ah
- Charging station
OPTIONAL
- GPS
- Base station
- AI + Vision Package
- 3D Localization and Navigation Package
- Chassis IP54
BLUEPRINTS
APPLICATIONS
LOGISTICS
AGRICULTURE
R & D
GOODS TRANSPORT
CONSTRUCTION









Autonomous mobile manipulator for R&D
RB-SUMMIT+ is the Autonomous Mobile Manipulator designed to execute various R&D tasks in collaborative environments such as laboratories, research centres and other academic environments, addressing final applications related to inspection, medicine or logistics.
This manipulator robot combines the mobility of Robotnik’s RB-SUMMIT platform and the flexibility of Kinova’s robotic arms
It can handle parts or objects weighing up to 2.6 kg with high precision, providing optimum performance for tasks such as sample picking, sorting, pick & place, quality control or packaging and labelling.
RB-SUMMIT+ uses the open and modular architecture based on ROS 2.
TECHNICAL SPECIFICATIONS
MECHANICAL
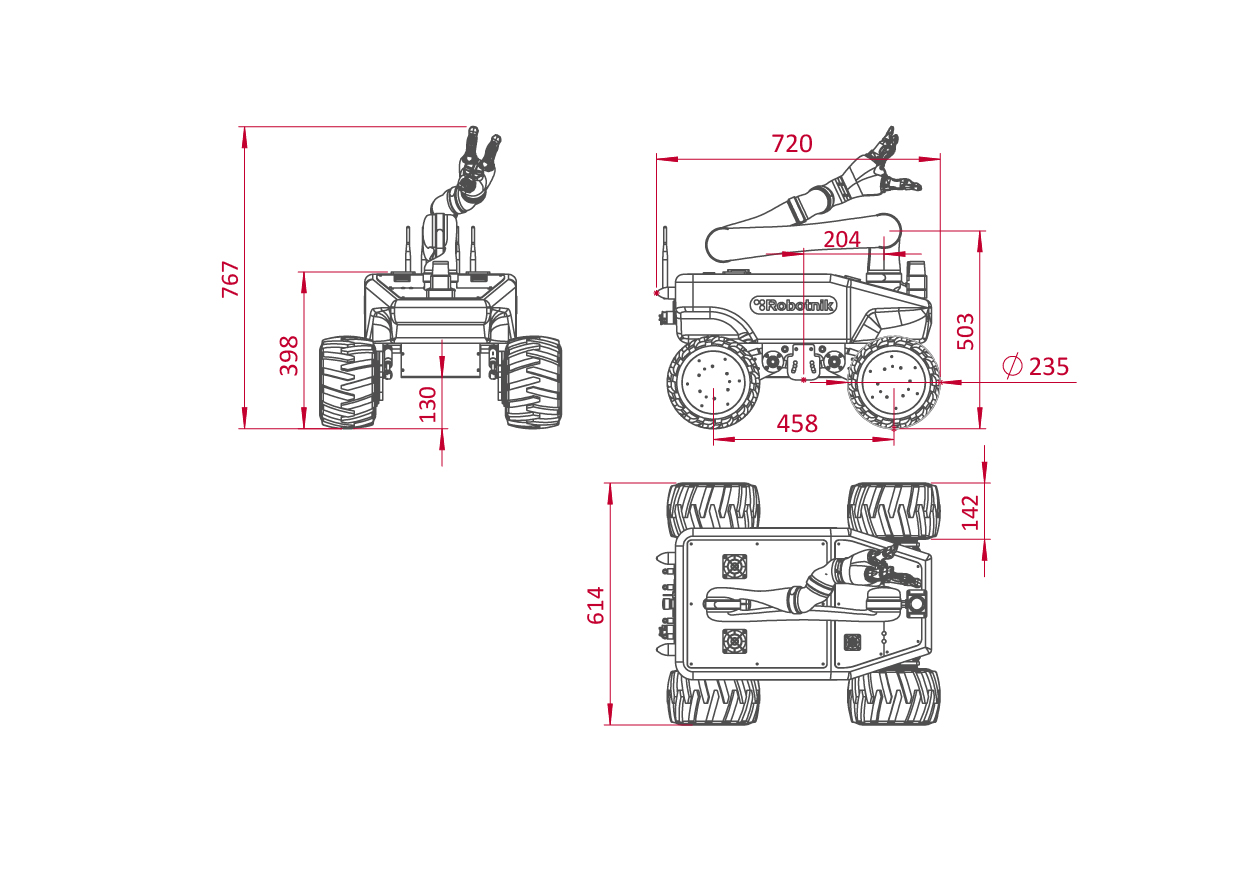
- Dimensions: 720 x 614 x 767 mm
- Weight:
- Platform: 65 kg
- Arm: 4,5 kg
- Payload:
- Platform: Up to 45 kg
- Arm: Up to 2,6 kg
- Speed: 3 m/s
- Environment: Indoor / Outdoor
- Enclosure class: IP40
- Autonomy: Up to 5 h
- Traction motors: 4 x 500 W with brake
- Kinematics: Skid steering
- Localization system: SLAM
- Temperature range: 0ºC to +50ºC
- Max. slope: 80%
COMMUNICATION
- WiFi 802.11 b/g/n/ac
- Bluetooth 4.0
CONNECTIVITY
- USB x1
- Ethernet x1
- DC Power Output
COMPONENTS
INCLUDED
- CPU Intel i7
- 2D Laser
- RGBD camera
- 5G Router
- IMU
- Battery 48VDC@15Ah
- Kinova Arm Gen2 - 6DOF
- Charging station
OPTIONAL
- GPS
- Base station
- AI + Vision Package
- 3D Localization and Navigation Package
- Kinova Arm Gen2 - 7DOF
- Kinova Arm Gen3 - 6DOF
- Kinova Arm Gen3 - 7DOF
- Chassis IP54
BLUEPRINTS
APPLICATIONS
PICK & PLACE
AGRICULTURE
R & D
MATERIAL HANDLING
CONSTRUCTION




Free course: How to master RB-SUMMIT with ROS
With the purchase of a RB-SUMMIT we will give you an annual licence in The Construct online academy.