What is a Autonomous and Collaborative Mobile Robot (AMR)?
A AMR is an intelligent mobile robot that assists humans in a shared workspace.
The main objective of any company is to obtain maximum efficiency in their work processes. A Collaborative Mobile Robot helps achieve this when it comes to transporting merchandise indoors. In this way, mobile robotics at the logistics sector optimizes the tasks that are repetitive, tedious and/or dangerous.
AMR technology is ready to be implemented in most industries.
Advantages of the mobile robots and mobile manipulators in the logistics market
Easy setup and installation
Appropriate to share the workspace with people
Automation of repetitive or unsafe processes
Different localization solutions available
Flexible routes vs fixed routes of traditional AGVs
Advanced intelligent functions: person following, docking to machinery, voice communication, etc.
Advanced user interface (HMI) allows to generate maps and define localization (waypoints) and routes in a simple and interactive way
FMS (Fleet Management System) for the optimal coordination of a fleet of robots that share a workspace and a set of resources
Why Robotnik?
Robotnik has been established as a European reference company in mobile service robotics.
In 2008, Robotnik introduced the first collaborative mobile robots in several hospitals for autonomous indoor transport. After that, the Robotnik solution has been extended and modularized to be adapted to different environments in a wide range of industries, always allowing the flexible automation of indoor transport.
We provide a reliable solution for indoor transport. A solution that integrates robots, localization systems, configuration and programming tools (HMI) and Fleet Management System (FMS).
Keys to introduces mobile robotics for logistics tasks

Quick and easy start-up
Flexibility and scalability
Flexible routes
Collaborative
Greater security

Smart functions

Easy operation

Easy fleet management
Fleet Management System (FMS)
The Fleet Management System (FMS) performs the complete and centralized management of the robot fleet, allowing the operator to manage the different mobile robotics systems from several kind of devices through standard communication protocols. In this way, the access to the robots can be done from any location (office, warehouse, home, …) and through any device (PDA, mobile phone, tablet, laptop,…).
The Fleet Management System (FMS) includes:
Graphical User Interface
A scheduler to plan missions
Management and assignment of tasks
Route planning
Fleet monitoring (location of each robot, status, battery level, mission in progress, etc.)
Monitoring of events and alarms: both the robots and the controllers that manage the communication with elevators, doors and loading / unloading docks
Monitoring of events and alarms
Both the robots and the controllers that manage the communication with elevators, doors and loading / unloading docks
The standard operation of a robot fleet in logistic environments requires the periodic execution of transport operations. These are defined within the FMS as “missions” and are managed within a dynamic database remotely accessible.
The FMS offers a superior layer of abstraction that allows interacting with the entire fleet of robots as if it were a single system. Different levels of access can be defined so that it is possible to specify typologies of users, each of which will have certain privileges to interact with the system. It is possible for example to select a specific robot for a mission, as well as if it is going to perform a loading or transport operation, etc., just as it is possible to require any robot for a mission and let the intelligent system decide which robot of the fleet will assign to this mission.
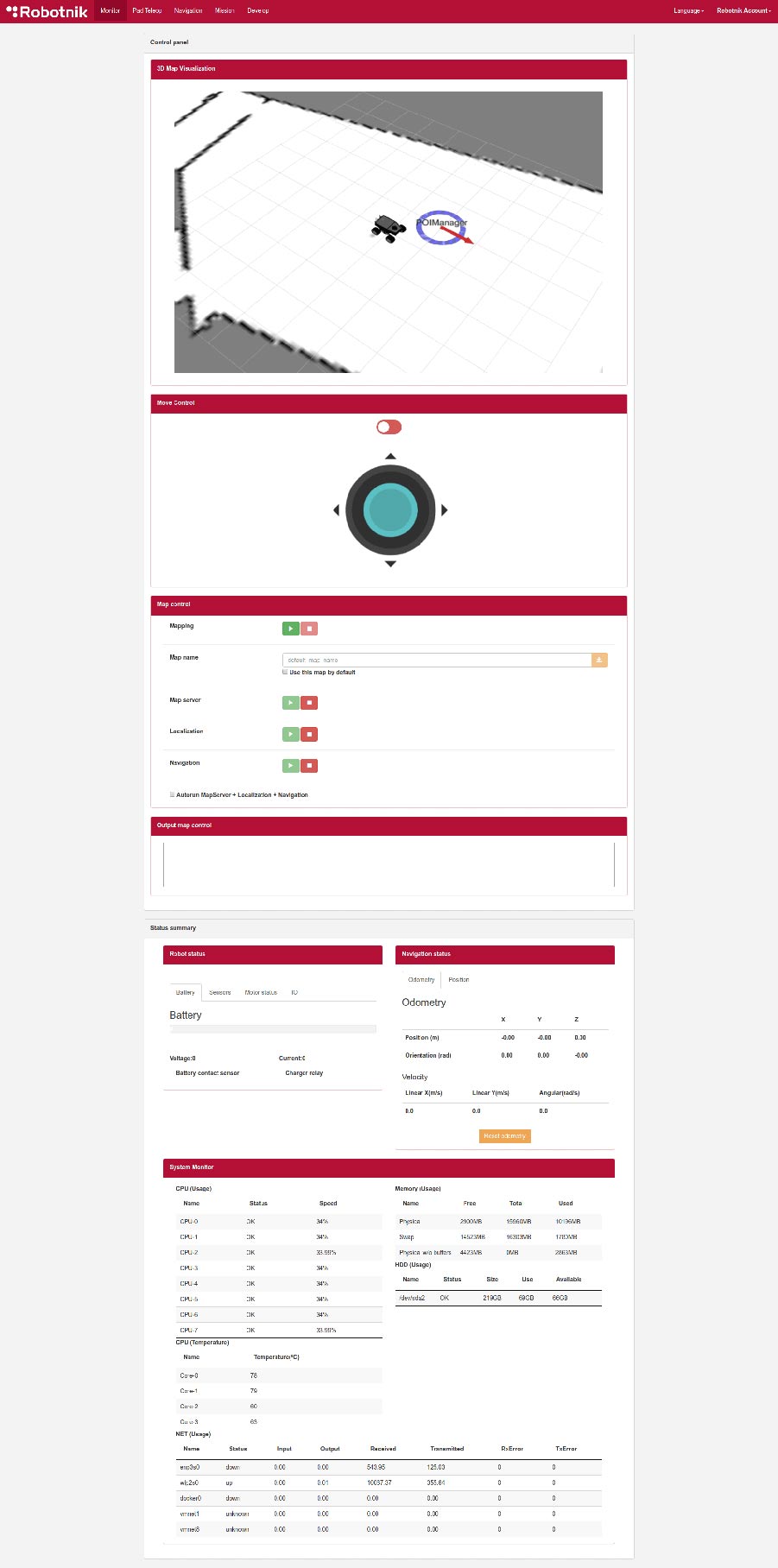
Robotnik’s interface
control your robot easily!
Robotnik’s robots for logistics include an interface that allows the client to control the operations of mapping, localization and navigation directly from any device connected to the robot network.
The main features are:
Web interface accessible from any operating system (Windows, Mac, Linux, …) and from any type of device (computer, tablet, mobile, …)
Interactive 3D visualization of the models of the robots as well as the 2D environment through which they navigate in real time
Easy mapping of real environments, simple storage and recovery of previously generated maps
Control and real-time visualization (streaming) of the images captured by the robot cameras
Operation of localization and autonomous navigation commands, besides the possibility of performing a manual control of the robot
Definition, selection and edition of waypoints or navigation coordinates that the robot will reach autonomously
Real-time monitoring of the state of robot resources: Independent use of each processor, temperature, disk usage,…
Status of on-board sensors (temperature, inertial measurement unit or odometry, among others)
Real-time health monitoring (battery level, motor status or component status, among others)