


MANIPULADOR MÓVIL CON BRAZO DE KINOVA INTEGRADO
ENTORNO INTERIOR Y EXTERIOR
HASTA 5 H DE AUTONOMÍA


Robot móvil ideal para aplicaciones de I+D por su versatilidad, flexibilidad y modularidad
El Robot Móvil Autónomo RB-SUMMIT está diseñado para desarrollar una amplia gama de aplicaciones de I+D en entornos de interior y especialmente de exterior.
Su versatilidad, tamaño y alta movilidad hacen que el RB-SUMMIT sea útil en distintos terrenos para tareas como la logística, transporte o agricultura, con una capacidad de carga de hasta 50 Kg.
Esta plataforma móvil multipropósito robusta y modular puede navegar autónomamente o ser teleoperada mediante una cámara Pan-Tilt-Zoom que transmite el vídeo en tiempo real.
También está disponible el manipulador móvil RB-SUMMIT+, desarrollado a partir de la plataforma RB-SUMMIT y el brazo de Kinova Gen2 Ultra lightweight robot.
RB-SUMMIT utiliza una arquitectura de control abierta y modular basada en ROS 2.
ESPECIFICACIONES TÉCNICAS
MECÁNICAS
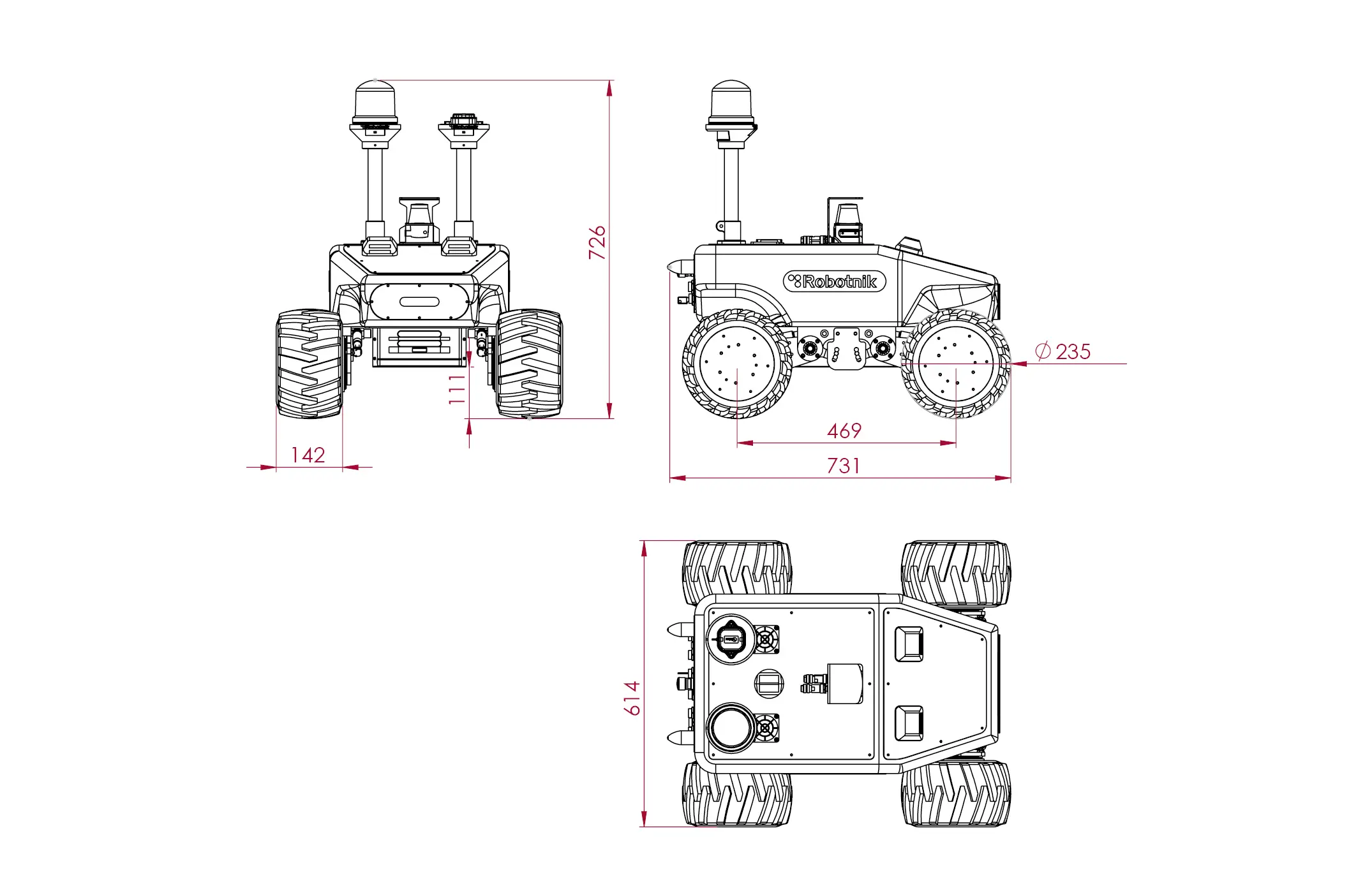
- Dimensiones: 731 x 614 x 726 mm
- Peso: 65 kg
- Capacidad de carga: Hasta 50 kg
- Velocidad: 3 m/s
- Entorno: Interior / Exterior
- Protección: IP50 / Hasta IP54 weatherproof (opcional)
- Autonomía: Hasta 5 h
- Motores de tracción: 4 x 500 W con freno
- Cinemática: Skid steering
- Sistema de localización: SLAM
- Rango de temperatura: -10ºC hasta +45ºC
- Pendiente máxima: 80%
COMUNICACIÓN
- WiFi 802.11 b/g/n/ac
- Bluetooth 4.0
CONECTIVIDAD
- USB x1
- Ethernet x1
- Salida de potencia
COMPONENTES
INCLUIDOS
- CPU Intel i7
- Láser 2D
- Cámara RGBD
- Router 5G
- IMU
- Batería 48VDC@15Ah
- Estación de carga
OPCIONALES
- GPS
- Estación base
- IA + Paquete de visión
- Paquete de localización y navegación 3D
- Chasis IP54
PLANOS
APLICACIONES
LOGÍSTICA
AGRICULTURA
I + D
TRANSPORTE DE CARGAS
CONSTRUCCIÓN









Manipulador móvil autónomo para I+D
RB-SUMMIT+ es el Manipulador Móvil Autónomo diseñado para ejecutar diversas tareas de I+D en entornos colaborativos como laboratorios, centros de investigación y demás ámbitos académicos, abordando aplicaciones finales relacionadas con inspección, medicina o logística.
Este robot manipulador combina la movilidad de la plataforma RB-SUMMIT de Robotnik y la flexibilidad de los brazos robóticos de Kinova.
Puede manipular piezas u objetos de hasta 2,6 Kg de peso con una gran precisión aportando un rendimiento óptimo en tareas como la recolección de muestras, clasificación, Pick & Place, control de calidad o envasado y etiquetado.
Todos los robots de Robotnik son modulares y su arquitectura está basada en ROS 2.
ESPECIFICACIONES TÉCNICAS
MECÁNICAS
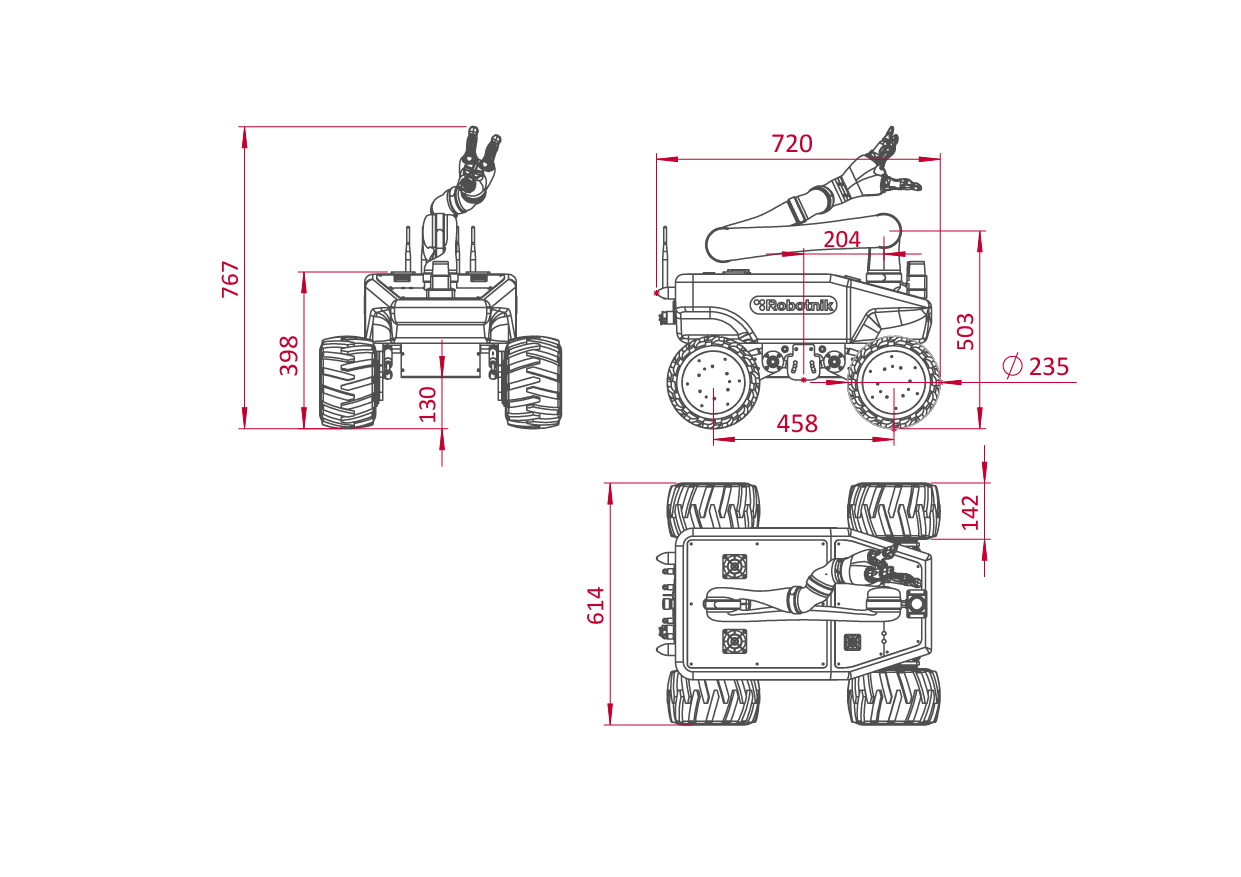
- Dimensiones: 720 x 614 x 767 mm
- Peso:
- Plataforma: 65 kg
- Brazo: 4,5 kg
- Capacidad de carga:
- Plataforma: Hasta 45 kg
- Brazo: Hasta 2,6 kg
- Velocidad: 3 m/s
- Entorno: Indoor / Outdoor
- Protección: IP40
- Autonomía: Hasta 5 h
- Motores de tracción: 4 x 500 W con freno
- Cinemática: Skid steering
- Sistema de localización: SLAM
- Rango de temperatura: 0ºC to +50ºC
- Pendiente máxima: 80%
COMUNICACIÓN
- WiFi 802.11 b/g/n/ac
- Bluetooth 4.0
CONECTIVIDAD
- USB x1
- Ethernet x1
- Salida de potencia
COMPONENTES
INCLUIDOS
- CPU Intel i7
- Láser 2D
- Cámara RGBD
- Router 5G
- IMU
- Batería 48VDC@15Ah
- Brazo Kinova Gen2 - 6GDL
- Estación de carga
OPCIONALES
- GPS
- Estación base
- IA + Paquete de visión
- Paquete de localización y navegación 3D
- Brazo Kinova Gen2 - 7GDL
- Brazo Kinova Gen3 - 6GDL
- Brazo Kinova Gen3 - 7GDL
- Chasis IP54
PLANOS
APLICACIONES
PICK & PLACE
AGRICULTURA
I + D
TRANSPORTE DE CARGAS
CONSTRUCCIÓN




Free course: How to master RB-SUMMIT with ROS
With the purchase of a RB-SUMMIT we will give you an annual licence in The Construct online academy.