

CPSWARM
Towards Smart Autonomous Cyber-Physical Systems: Unmanned Aerial / Ground Vehicles and Robots
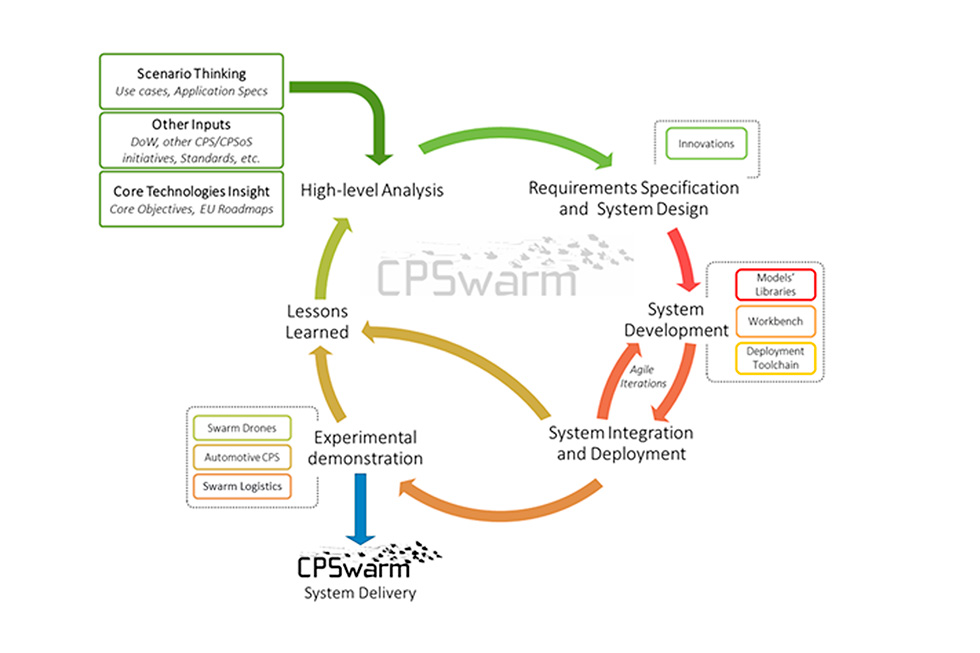
CPSwarm proposes a new science of system integration and tools to support engineering of CPS swarms (Cyber Phisical Systems). CPSwarm tools will ease development and integration of complex herds of heterogeneous CPS that collaborate based on local policies and that exhibit a collective behavior capable of solving complex, industrial-driven, real-world problems.
The project defines a complete toolchain that enables the designer to:
● Set-up collaborative autonomous CPSs.
● Test the swarm performance with respect to the design goal.
● Massively deploy solutions towards “reconfigurable” CPS devices.
Model-centric design and predictive engineering are the pillars of the project, enabling definition, composition, verification and simulation of collaborative, autonomous CPS while accounting for various dynamics, constraints and for safety, performance and cost efficiency issues.
ROBOTNIK IN THE PROJECT
Robotnik participates in the definition of business models for ground robots as well as of the scenarios, use cases and requirements, also supporting the definition of the CPSwarm architecture and continuous system integration. Moreover Robotnik participates in the integration of external simulators and developing the CPS simulation environment, with a focus on ROS solutions. Finally Robotnik is in charge of the “Swarm logistics scenario”, supporting the validation of industrial use cases.

Project Partners







More projects