

CPSWARM
Sistemas ciberfísicos autónomos inteligentes
CPSwarm propone la integración de diferentes sistemas de apoyo a la ingeniería de enjambres de CPS (Cyber Phisical Systems). Estos sistemas se usan en aplicaciones críticas de seguridad, transporte y nuevas ciudades inteligentes, entre otros. Su integración y la interacción entre varios CPS está siendo desarrollada en la actualidad.
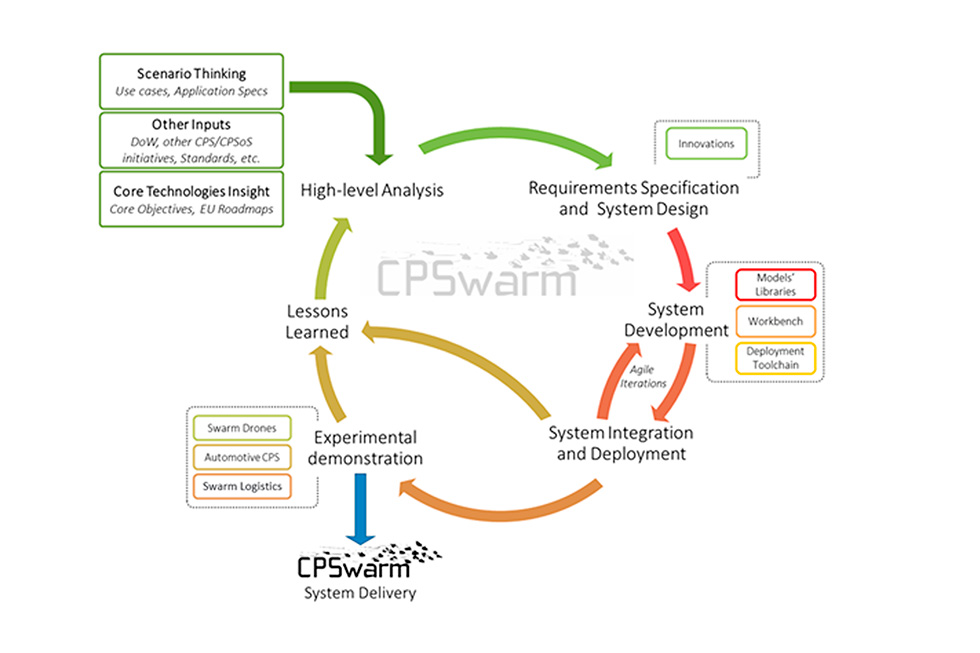
El proyecto define una cadena de herramientas completa que permite al diseñador:
● Configurar CPS autónomos colaborativos.
● Probar el rendimiento del enjambre con respecto al objetivo de diseño
● Despliegue masivo de soluciones hacia dispositivos CPS «reconfigurables».
El diseño centrado en el modelo y la ingeniería predictiva son los pilares del proyecto, lo que permite la definición, composición, verificación y simulación de CPS autónomo y colaborativo, al tiempo que tiene en cuenta diversas dinámicas, restricciones y problemas de seguridad, rendimiento y eficiencia de costos.
ROBOTNIK EN EL PROYECTO
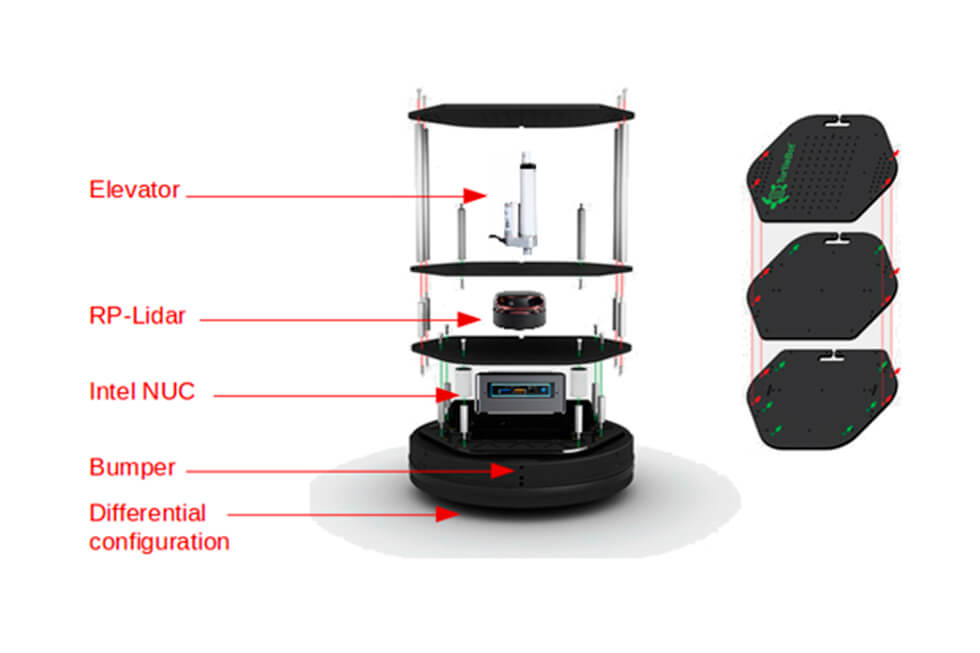
Robotnik participa en la definición de modelos de negocio para robots terrestres, así como de los escenarios, casos de uso y requisitos. Robotnik también apoya la definición de la arquitectura CPSwarm y la integración continua del sistema. Además, participa en la integración de simuladores externos y en el desarrollo del entorno de simulación CPS, enfocado al entorno ROS. Finalmente, Robotnik está a cargo del «escenario logístico de Enjambre», apoyando la validación de casos de uso industrial.
Socios del proyecto







Ver más proyectos