

BADGER
Robot autónomo subterráneo para realizar zanjas, mapeo y navegación
El objetivo del proyecto BADGER es el diseño y desarrollo de un sistema robótico subterráneo autónomo que puede perforar, maniobrar, localizar, mapear y navegar en el espacio subterráneo. El sistema está equipado con herramientas que le permiten construir redes horizontales y verticales de agujeros estables y tuberías.
El sistema robótico propuesto permite la ejecución de tareas de alto impacto social y económico, incluidas construcciones sin zanjas, instalaciones de cableado y tuberías, investigaciones geotécnicas, instalaciones de riego a gran escala, operaciones de búsqueda y rescate, ciencia y exploración remotas, y aplicaciones de defensa.
ROBOTNIK EN EL PROYECTO
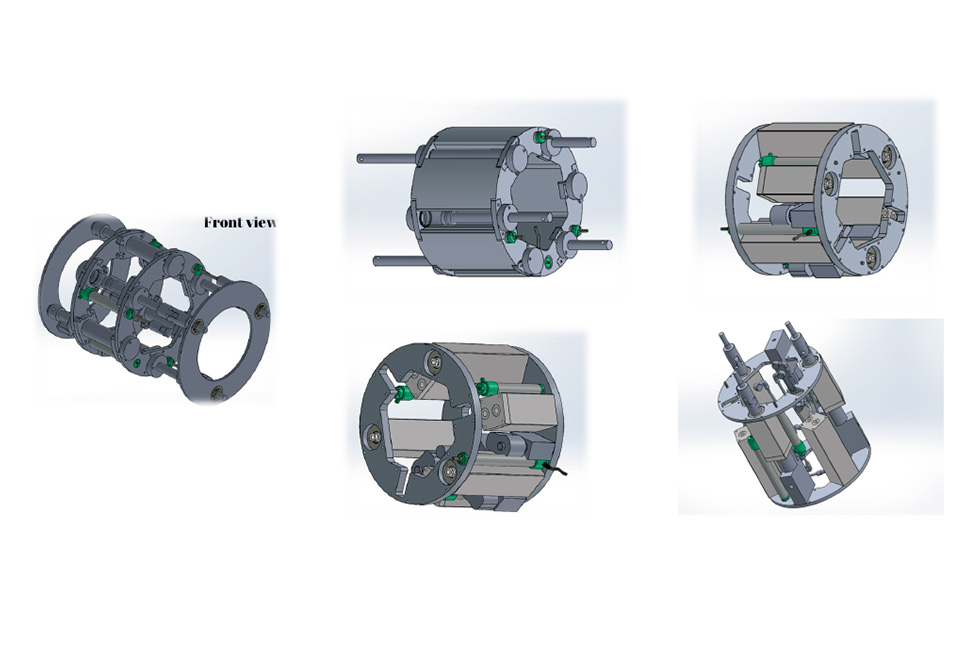
Las principales tareas de Robotnik dentro del proyecto están relacionadas con el diseño y desarrollo de componentes específicos para el sistema robótico, como el módulo de unión y la instalación del cabezal de la impresora en el robot o en el último módulo del robot articulado. Asimismo, Robotnik lleva a cabo parte del plan de explotación del sistema robótico.


Socios del proyecto







Ver más proyectos
