

SUMINISTRA
Optimisation and digitisation of the supply chain
SUMINISTRA proposes various innovative research projects integrating areas of knowledge such as unmanned vehicles, digital twins, distributed robotics, communications and interoperability to drive the transformation of the supply chain. To this end, SUMINISTRA proposes industrial research, in TRL 3 and 4, in areas that enable disruptive innovations for industry that generate greater competitiveness and efficiency.
In this way, its main objectives are:
- Redesigning a more automated supply chain through unmanned, aerial and ground vehicles, and fostering the development of collaborative environments with humans.
- Adding value to logistics processes, through the development of intelligent systems for inspections and inventory maintenance in warehouses, freeing up skilled staff for higher value-added tasks.
- Acceleration in decision-making, using optimisation and predictive algorithms for functions that contribute to the efficiency of warehouse processes, including the integration of both on-board, collaborative and global intelligence. All this using low latency, high transmission rate 5G communications and high precision indoor positioning.

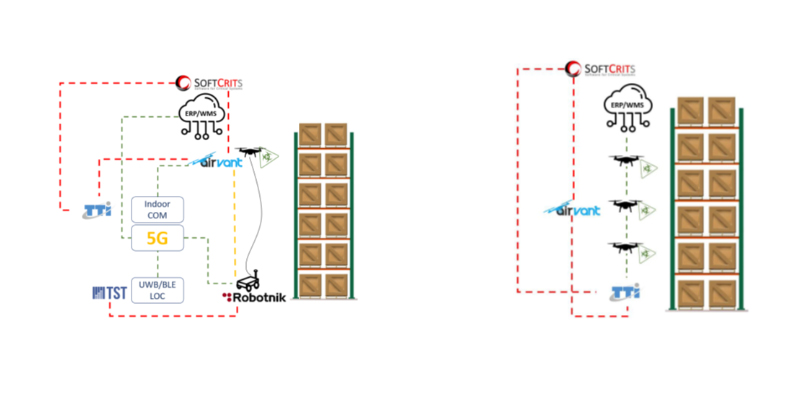
For this purpose, two use cases are defined:
- Development of a system that enables the process of taking inventory by drone, ensuring real-time visibility of assets and verification of the disposition of the state of the merchandise in the relevant locations.
- Deployment of a set of drones to perform asset inspection operations in the aisles of distribution centres.
ROBOTNIK IN THE PROJECT
Robotnik’s main objective is focused on the investigation of new technologies that facilitate the use of mobile robots in applications within the supply chain. To make this possible and to achieve more and more autonomy and work capacity in environments with humans, Robotnik’s RB-KAIROS will integrate new sensors, power systems and will improve the communication and location of the UGVs.
- Coordination algorithms between UAV and UGV, to carry out inspection tasks: Development of an innovative collaborative guidance, navigation and control system supported by the exchange of information between both platforms and by a fusion of distributed sensors and information that allow a control of precise relative positioning between both vehicles and the use of global positioning information within the factory
- Design of uninterruptible power supply systems and energy management for the drone-AGV.
- Design of artificial vision algorithms for the early detection of risk situations by warehouse operators and AGVs based on spatiotemporal analysis of video movements.
- Research on algorithms for estimation and fusion of positioning and sensor data of different nature with extended Kalman filters for the application of high-precision location of AGVs, drones and other devices.
- Adaptation to existing interface standards for AGVs control. Research on existing protocols, in particular compliance and extension of the VDA 5050 standard according to use cases.
Project Partners










More projects
Latest posts by Robotnik (see all)
- Autonomous Robotics as a Strategic Infrastructure: The Challenge of Inspecting and Protecting Critical Systems - 10 February 2026
- Industrial robotics in 2025: trends, figures, and global outlook - 15 December 2025
- Artificial Intelligence for vision-based autonomous inspection - 27 November 2025