

ARESIBO
Eficiencia de los sistemas de vigilancia fronteriza
ARESIBO tiene como objetivo mejorar la eficiencia de los sistemas de vigilancia fronteriza al proporcionar a los equipos operativos y al comando táctico una información precisa y completa.
Los pilares de la investigación en ARESIBO son tres:
● Establecer una configuración, tanto a nivel táctico como de ejecución, para optimizar la colaboración entre humanos y sensores (fijos y móviles).
● Mejorar la comprensión de la situación mediante el procesamiento de datos del sensor, la correlación entre datos y la creación de conocimiento a través de técnicas de aprendizaje.
● Ayudar a mejorar la capacidad de conciencia de la situación a nivel C2 combinando informes sobre misiones anteriores, comprensión de la situación en tiempo real y análisis de amenazas para acciones futuras. Ello se utilizará para optimizar las operaciones (despliegue de equipos y posicionamiento de sensores) y como herramienta de información en línea para los equipos, de manera que podrán acceder a los resultados de las misiones anteriores mientras están en el campo.
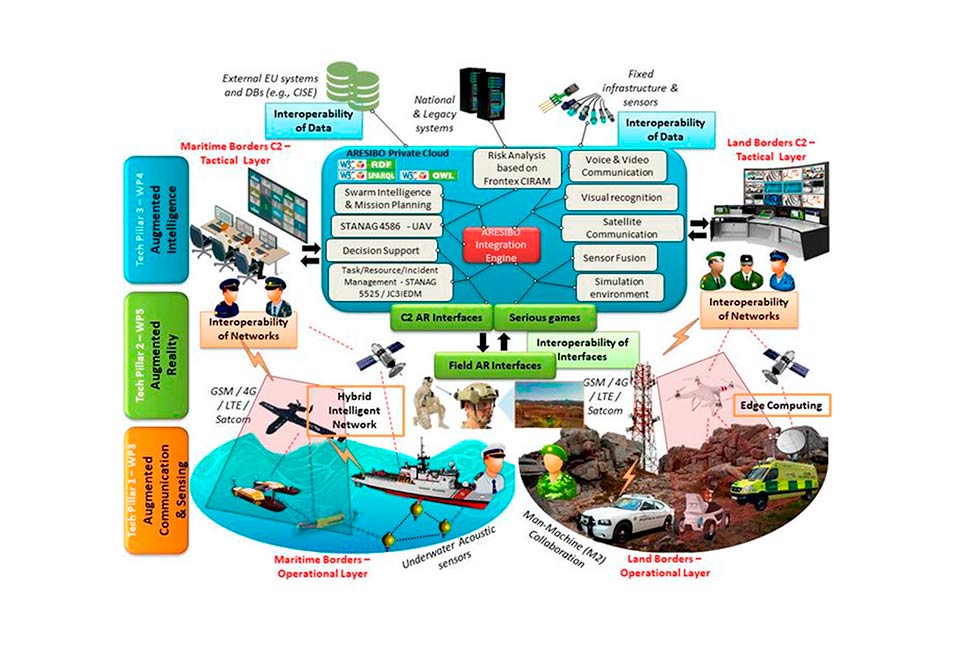
ARESIBO integra estas actividades:
● Plataformas de vigilancia (aire, tierra, superficie, bajo el agua) para optimizar la colaboración de las plataformas y su posicionamiento (entre ellos y con los equipos).
● Procesamiento del sensor para interpretar, fusionar y correlacionar todos los datos, generando información y conocimiento.
● Técnicas de realidad aumentada para proporcionar a los operadores una imagen de conciencia de la situación que sea adecuada para sus misiones (información mínima para una comprensión máxima) tanto a nivel de equipo como a nivel táctico de C2.
El sistema ARESIBO se probará y evaluará en un entorno controlado que permita realizar pruebas en cualquier momento y en condiciones reales en Finlandia, Grecia, Rumania y Portugal.
ROBOTNIK EN EL PROYECTO
Robotnik, como proveedor de hardware, está desarrollando un nuevo concepto de UGV (vehículo terrestre no tripulado) capaz de desplegar en campo de forma autónoma un pequeño UAV (vehículo aéreo no tripulado).
El despliegue se realiza en modo de vuelo libre, donde el UAV se despliega sin ninguna conexión con el UGV, pero una plataforma de carga autónoma permite recargar las baterías una vez que aterriza en el robot. Además, el UGV está equipado con sensores y actuadores para la navegación autónoma y la vigilancia de fronteras. El UGV está conectado a una estación de control de tierra (GCS) que proporciona monitoreo remoto, teleoperación y comando del vehículo. Robotnik también está desarrollando mapeo 3D de alta resolución del entorno, para ser utilizado en navegación autónoma y en la especificación de la misión desde el Centro de Comando.
Robotnik lidera la tarea relacionada con la integración de software y hardware a nivel de componente.





Socios del proyecto

















Ver más proyectos