

ARESIBO
Augmented Reality Enriched Situation awareness for Border security
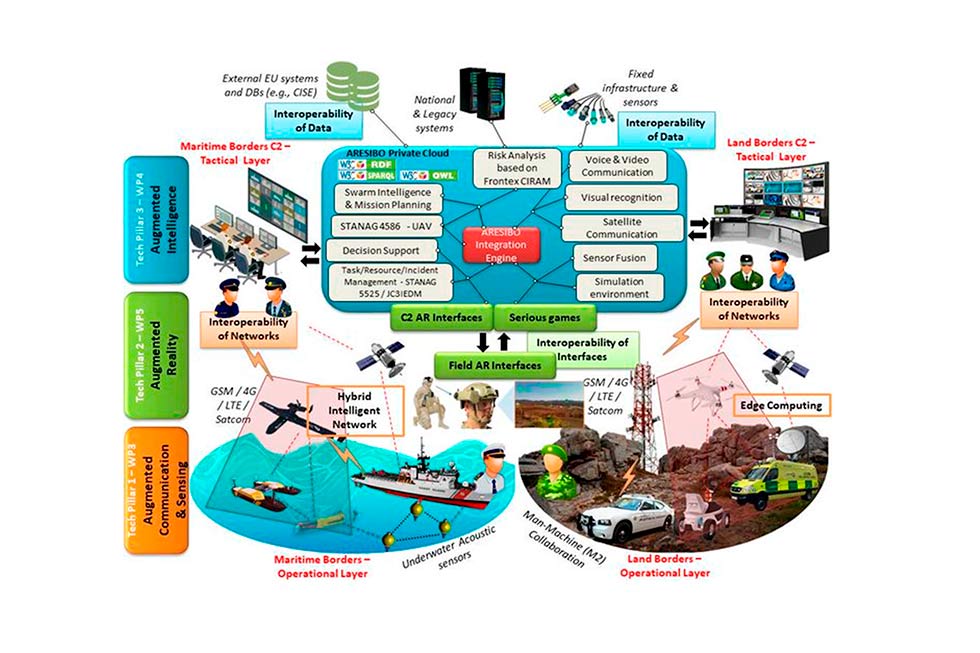
ARESIBO aims at improving the efficiency of the border surveillance systems by providing the operational teams and the tactical command with an accurate and comprehensive information.
The pillars of research in ARESIBO are three-fold:
● Set-up a complete configuration at tactical and execution level to optimise
the collaboration between human and sensors (fixed and mobile).
● Enhancing the understanding of the situation through processing of sensor data, correlation between heterogeneous data and information and creation of knowledge through learning techniques.
● Create a situation awareness capability at C2 level that will combine reports on previous missions, real time situation understanding and threat analysis for future actions. This capability will be used to optimise the operations (teams deployment and sensor positioning) as well as an online briefing tool for the teams that will be able to access to the results of the previous missions while in the field.
ARESIBO integrates these activities:
● Surveillance platforms (air, ground, surface, underwater) to optimise the collaborative capabilities of the platforms and their positioning (between themselves and with the teams).
● Sensor processing to interpret, fuse and correlate all the data to produce information and knowledge.
● Augmented reality techniques to elaborate and provide to the operators a situation awareness picture which is fit for their missions (minimum information for maximal understanding) both as team level and tactical C2 level.
The ARESIBO system will be tested and assessed in a controlled environment enabling testing at any time and in real conditions in Finland, Greece, Romania and Portugal.
ROBOTNIK IN THE PROJECT
Robotnik as a hardware provider is developing a new concept of UGV (Unmanned Ground Vehicle) capable of autonomous on-field deployment of small UAV (Unmanned Aerial Vehicle). The deployment is done in a free flight mode, where the UAV is deployed without any connection to the UGV but an autonomous charging pad allows to recharge the batteries once it is landed into the robot. Moreover, the UGV is equipped with sensors and actuators for autonomous navigation and border surveillance. The UGV is connected to a Ground Control Station (GCS) that provides remote monitoring, teleoperation and commanding of the vehicle. Robotnik is also developing high resolution 3D mapping of the environment, to be used in autonomous navigation and in the mission specification from the Command Center.
Robotnik is leading the task related to the software and hardware integration at component level.





Project Partners

















More projects