

SUMINISTRA
Optimización y digitalización de la cadena de suministro
SUMINISTRA propone varios proyectos de investigación innovadores que trabajan en diferentes áreas de conocimiento como vehículos no tripulados, gemelos digitales, robótica distribuida, comunicaciones e interoperabilidad para impulsar la transformación de la cadena de suministro. Para ello, SUMINISTRA propone investigación industrial, en TRL 3 y 4 en áreas que permitan innovaciones disruptivas para la industria, generando mayor competitividad y eficiencia.
Los principales objetivos en SUMINISTRA son:
- Rediseñar una cadena de suministro más automatizada a través de vehículos no tripulados, aéreos y terrestres, y fomentar el desarrollo de entornos colaborativos con humanos.
- Añadir valor a los procesos logísticos, mediante el desarrollo de sistemas inteligentes de inspección y mantenimiento de inventarios en almacenes, de forma que el personal cualificado pueda realizar tareas de mayor valor.
- Aceleración en la toma de decisiones, utilizando algoritmos de optimización y predicción para funciones que contribuyan a la eficiencia de los procesos de almacén, incluyendo la integración de inteligencia colaborativa y a nivel global. Todo ello utilizando comunicaciones 5G de baja latencia y alta velocidad de transmisión y posicionamiento en interiores de alta precisión.

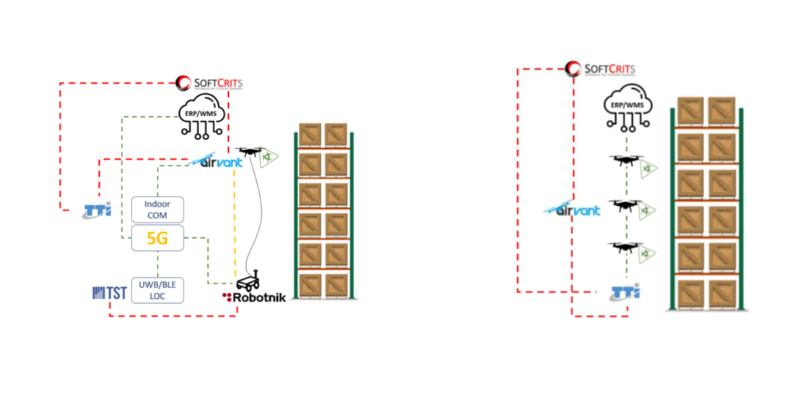
Para ello, se definen dos casos de uso:
- Desarrollo de un sistema que permita el proceso de toma de inventario mediante drones, asegurando la visibilidad en tiempo real de los activos y la verificación de la disposición del estado de la mercancía en las ubicaciones pertinentes.
- Despliegue de un conjunto de drones para realizar operaciones de inspección de activos en los pasillos de los centros de distribución.
ROBOTNIK EN EL PROYECTO
El objetivo principal de Robotnik está centrado en la investigación de nuevas tecnologías que faciliten el uso de robots móviles en aplicaciones dentro de la cadena de suministro. Para que esto sea posible y para conseguir cada vez más autonomía y capacidad de trabajo en entornos con humanos, el RB-KAIROS de Robotnik integrará nuevos sensores, sistemas de alimentación y mejorará la comunicación y localización de los UGVs.
- Algoritmos de coordinación entre vehículos UAV y UGV, para la realización de las tareas de inspección: Desarrollar un innovador sistema de guiado, navegación y control colaborativo sustentado por el intercambio de información entre ambas plataformas y por una fusión de sensores e información distribuidos que permitan un control del posicionamiento relativo preciso entre ambos vehículos y el uso de la información de posicionamiento global dentro de la factoría
- Diseño de sistemas de alimentación ininterrumpida y gestión de energía para el dron-AGV.
- Diseño de algoritmos de visión artificial para la detección temprana de situaciones de riesgo por parte de operarios de almacén y AGVs basado en el análisis espacio-temporal de movimientos en video.
- Investigación en algoritmos de estimación y fusión de datos de posicionamiento y sensórica de diferente naturaleza con filtros Kalman extendidos para la aplicación de localización de alta precisión de AGV, drones y otros dispositivos.
- Adaptación a estándares existentes de interfaz para control de AGVs. Investigación en los protocolos existentes, en particular conformidad y extensión del standard VDA 5050 según casos de uso.
Socios en el proyecto










Ver más proyectos