


ROS 2 (Robot Operating System): overview and key points for robotics software
For over a decade, ROS (Robot Operating System) has established itself as the reference environment for developing…
Custom robots in industry and manufacturing
One of the most robotics trends in industry is the customization of robots to meet specific manufacturing needs.…

Uses of a mobile manipulator robot: beyond robotic arms
Robotic arms expansion goes on, driven by the growing need for automation in more and more sectors and the emergence of…

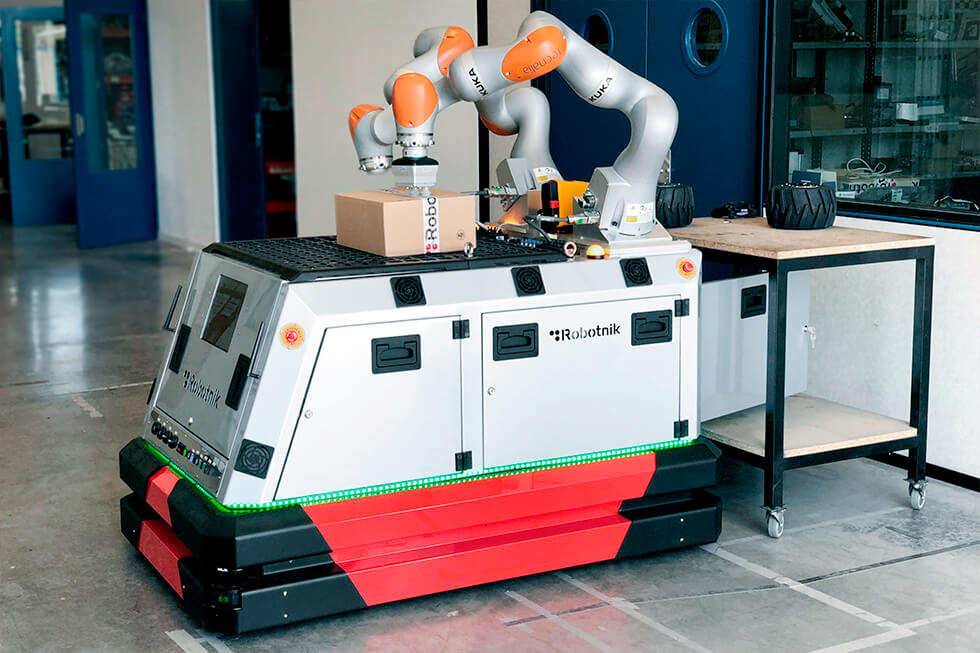
Mobile manipulators: combining mobility and manipulation for diverse environments
Autonomous navigation of AMR (Autonomous Mobile Robots) and manipulation of robotic arms are advanced technologies that…

Robotics for end of line automation: RB-KAIROS+
Within industrial production, the automation of end-of-line tasks is essential to ensure quality and efficiency in…

Robotics for inventory and stock control: Next step for warehouses
One of the areas that has changed the most within the logistics industry is stock control. Automating stock control…

Top innovations in warehouse automation: automated storage systems
Warehouse automation is by no means a new concept. However, now we are talking about technologies for warehouse…

Top 50 FAQs about Mobile Manipulators: Precision robotics for multiple environments
After a very successful reading of the ‘Complete guide to robot manipulators: advantages and applications’,…
Innovations and applications of industrial mobile robots
The rapid evolution of factory automation is pushing industries to adopt smarter and more efficient technologies. Among…

Assembly robots: transforming assembly lines
Global competition in production has accelerated the need for automation in industry. Robot manipulators such as the…