


Automatización y robótica móvil: impulsando la industria aeronáutica
El sector aeroespacial atraviesa un momento de evolución crucial, tal y como señalan varios informes de los últimos…

Robot Manipulador Móvil Autónomo para el lavado de vehículos: ISTOBAL y Robotnik
La transformación digital de la industria automotriz no se limita a la fabricación. Procesos tradicionalmente manuales,…

La robótica móvil de exterior explicada en 10 FAQS
En el anterior artículo sobre robótica móvil autónoma para entornos de exterior, se exponen en detalle diferentes…

ROS 2 (Robot Operating System): visión general y puntos clave del software de robótica
Desde hace más de una década, ROS (Robot Operating System) se ha consolidado como el entorno de referencia para el…
Robots customizados para la industria
Una de las tendencias más destacadas en robótica industrial es la personalización de robots que se adapten a…

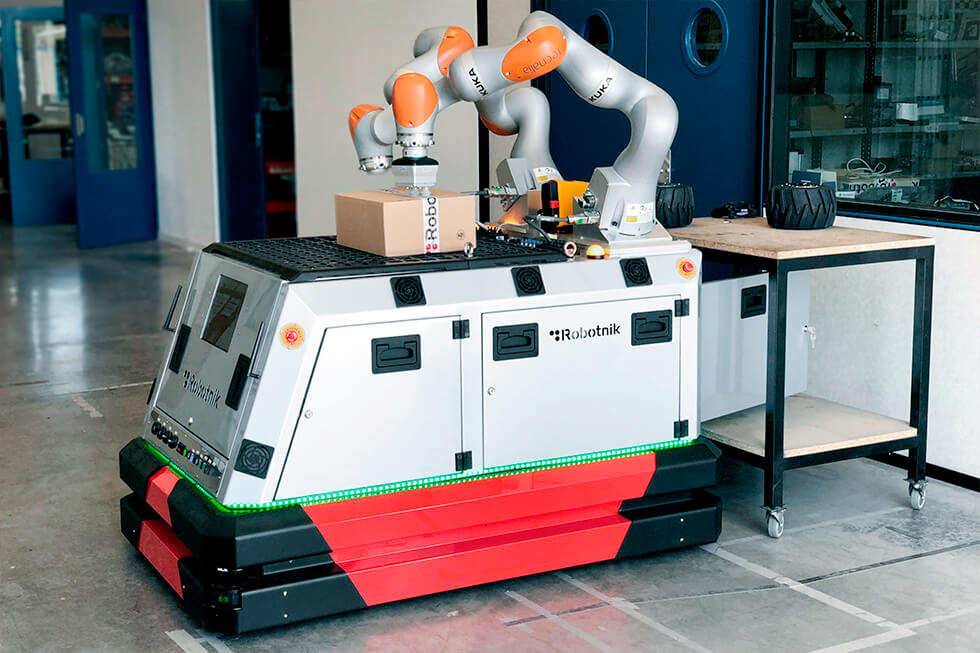
Usos de un robot manipulador móvil: más que un brazo robótico
La expansión de los brazos robóticos continúa, impulsada por la creciente necesidad de automatización en cada vez más…

Manipuladores móviles: Combinación de movilidad y manipulación para múltiples entornos
La navegación autónoma de los AMR (Robots Móviles Autónomos) y la manipulación de brazos robóticos son tecnologías…

Robótica para la automatización del final de línea: RB-KAIROS+
Dentro de la producción industrial, la automatización de las tareas de final de línea, son esenciales para garantizar…

Robótica para el control de stock: el siguiente nivel en los almacenes
Una de las áreas que más ha cambiado dentro de la industria logística es el control de stock. La automatización del…

Innovaciones en automatización de almacenes: Sistemas de almacenamiento automatizado
La automatización de almacenes no es, en absoluto, un concepto nuevo. Sin embargo, ahora hablamos de tecnologías para…