


Manipuladores móviles: la producción inteligente que su fábrica necesita
¿Qué es exactamente un robot manipulador? ¿Cuáles son realmente los beneficios de los manipuladores móviles? La…

Caso de éxito de Robotnik y su RB-KAIROS+ en una empresa neerlandesa
AER publica en su anuario de 2021 el caso de éxito de Robotnik y su RB-KAIROS+ en una empresa de producción de…
Como usar MoveIT para desarrollar una aplicación de manipulación robótica
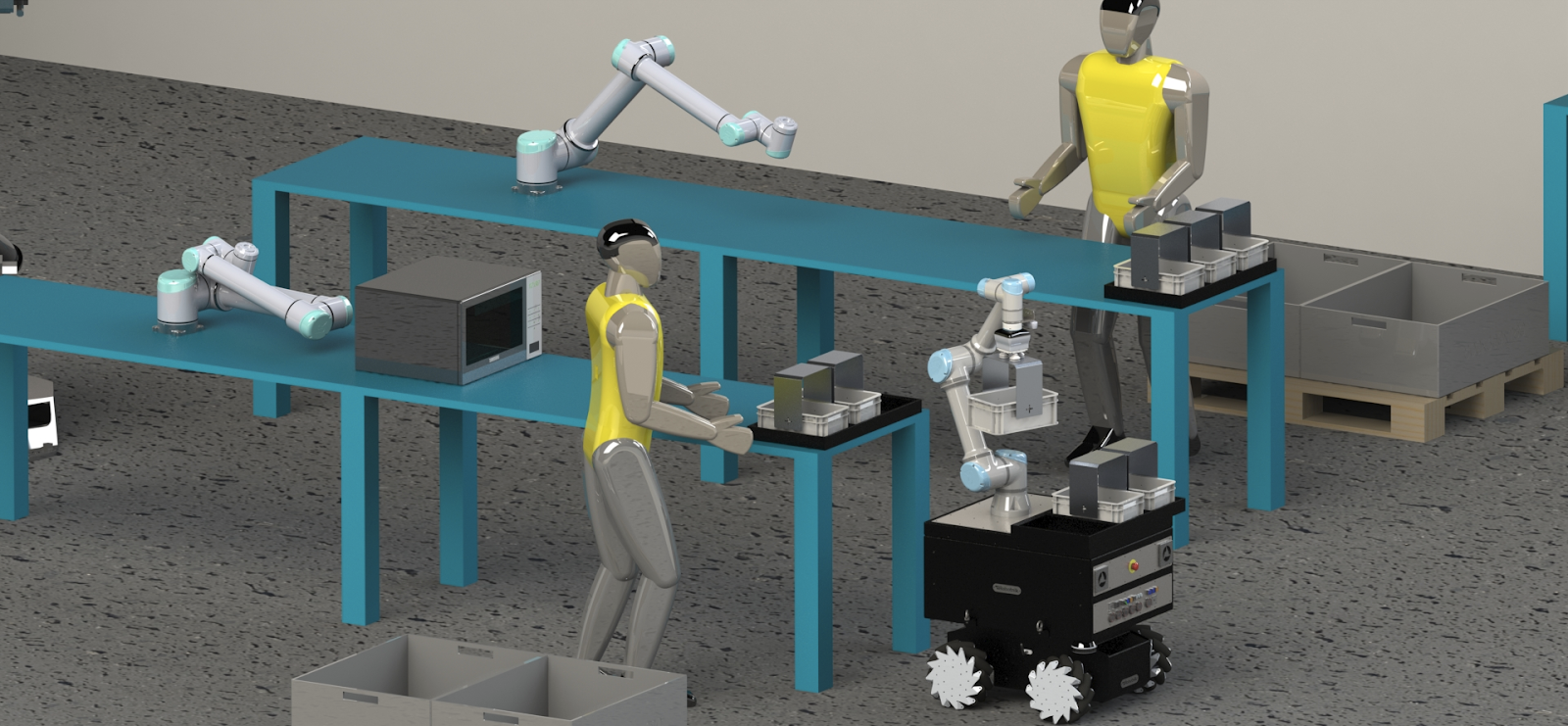
El proyecto HR-Recycler, financiado por la Comisión Europea, tiene como objetivo desarrollar un entorno híbrido de…

RB-KAIROS+ : amplía las capacidades de los brazos e-Series de Universal Robots
La robótica colaborativa es una realidad dentro de la industria 4.0 y demuestra que el futuro de la misma se presenta…

RB-KAIROS+: 1er robot móvil preparado para integrar los brazos UR e-Series
Concebido para todo tipo de aplicaciones industriales, se presenta como una solución para los actuales usuarios de un…

ROS Control: la clave para consolidar ROS en la industria robótica
El software ROS ha sido uno de los mayores avances de la industria de la robótica en los últimos años. Se trataba de…

Robotnik, líder en robótica móvil colaborativa
Hace ya tiempo que el sector de la robótica no es futuro, sino que es presente. En la actualidad, la robótica forma…

Robotnik, patrocinador premium del 3er ROS Developers Day
Robotnik patrocina el 3er ROS Developers Day (* anteriormente llamado "Conferencia de Desarrolladores ROS"), un evento…

Robotnik muestra las ventajas de la manipulación móvil industrial en el ‘We Are Cobots’
‘Aplicaciones de manipulación móvil industrial’ es el título del webinar de Robotnik en la primera edición de la feria…

La Organización de Logística UNO comparte nuestras soluciones de robótica
UNO logística, Organización Empresarial de Logística y Transporte, nos dedica un artículo completo en el que analiza…