


Robots de ensamblaje: transformando las cadenas de montaje
La competencia global a nivel de producción, ha acelerado la necesidad de automatización de la industria. Robots…

Guía completa de robots manipuladores: ventajas y aplicaciones
¿QUÉ ES UN ROBOT MANIPULADOR?Los robots manipuladores son sistemas robóticos diseñados para realizar tareas de…

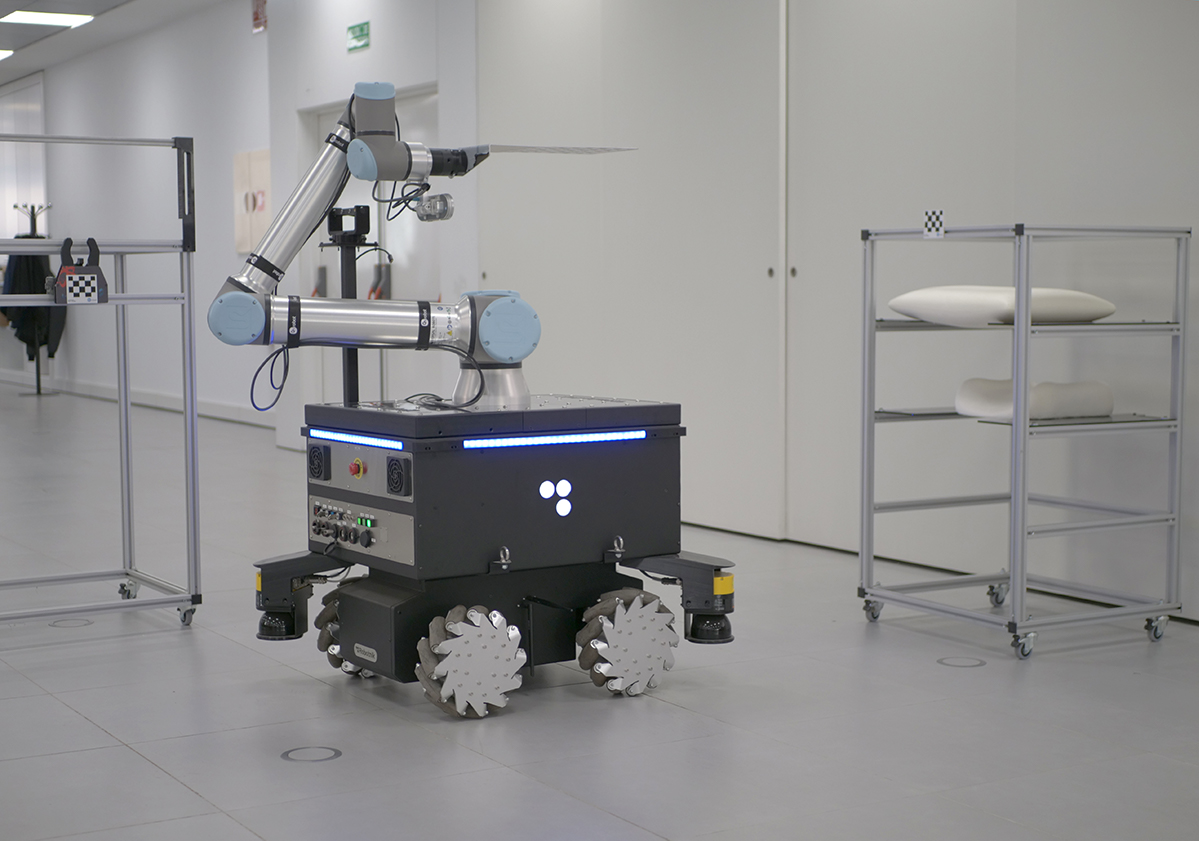
Manipuladores móviles: Precisión, IA y usos peligrosos
La precisión es un requisito fundamental para la mayoría de tareas de manipulación industrial. De hecho, se podría…

¿Cuáles son los diferentes tipos de robots? 5 fortalezas de 5 robots móviles autónomos
¿Cuáles son los diferentes tipos de robots? En medio de la amplia gama de robótica móvil disponible en el mercado,…

El futuro está aquí: los robots de Inteligencia Artificial transformando industrias
La inteligencia artificial (IA) y la robótica móvil han avanzado significativamente en las últimas décadas y la…

Ventajas y beneficios de los robots industriales: mejorando las 4 D's
Desde que la robótica móvil autónoma comenzó a formar parte del escenario industrial, ha cambiado la manera en que se…


Robots para aplicaciones de manipulación de materiales
Las empresas que desean iniciar el camino hacia la automatización siguen teniendo dudas en cuanto a los detalles…

¿Cómo ayudan los robots en un almacén?
El consumidor actual exige cada vez mayor rapidez en los tiempos de producción y entrega de producto. Esto implica que…