

¿QUÉ ES UN ROBOT MANIPULADOR?
Los robots manipuladores son sistemas robóticos diseñados para realizar tareas de manipulación física, como levantar, mover y colocar objetos en diferentes entornos industriales sin la necesidad de contacto directo por parte de un operador. Estos manipuladores industriales tradicionales constan, por definición, de un brazo mecánico articulado que se instala de manera fija en la ubicación deseada y que puede ser controlado de forma autónoma o teleoperada por un operador humano.
El brazo manipulador llevará también una herramienta final (end effector) en función de la aplicación. Las herramientas finales pueden ser ventosas, pinzas, garras, mano robótica, atornillador o avanzados sistemas de visión o escaneado.
Los primeros usos de los brazos manipuladores fueron, en gran medida, aquellos que requerían manipular materiales en lugares de difícil acceso o cuyo contacto era peligroso para los humanos: radioactivos, pesados, altas temperaturas, alto voltaje, etc.
Actualmente, al hablar de robot manipulador, ya no se entiende únicamente el brazo manipulador fijado de manera estática sino que aparece la manipulación móvil como avanzado desarrollo surgido de la integración de un brazo manipulador y una plataforma robótica móvil.
¿QUÉ ES UN ROBOT MANIPULADOR MÓVIL?
Un manipulador móvil es un tipo de robot que combina las capacidades de manipulación de objetos de un brazo robótico con la movilidad de una plataforma móvil. Es decir, un manipulador móvil es capaz de desplazarse de un lugar a otro mientras realiza tareas de manipulación de piezas como levantar, transportar o colocar objetos.
Las aplicaciones más frecuentes que un robot manipulador móvil ejecuta son de logística y almacenes para transportar mercancías entre estanterías o áreas de almacenamiento, así como en aplicaciones de fabricación para mover materiales o manipular piezas entre diferentes estaciones de trabajo de forma autónoma.
Este manipulador móvil puede realizar de manera autónoma tareas que van desde el ensamblaje o montaje de componentes electrónicos hasta el control de calidad.
Está equipado con una combinación de sensores y actuadores que les permiten percibir y responder a su entorno de manera eficiente. Esto incluye sensores de proximidad para detectar obstáculos y evitar colisiones o sistemas de navegación y localización para planificar rutas y moverse de manera autónoma en entornos dinámicos y no estructurados.
La mejora en la percepción sensorial ha permitido a los manipuladores móviles detectar y mapear su entorno con mayor precisión, gracias a la integración de sensores avanzados como cámaras 3D, LiDAR y sistemas de ultrasonido. A esto se suma el desarrollo continuo de algoritmos de planificación de trayectorias, que les permite calcular rutas óptimas y evitar obstáculos en tiempo real, mejorando la eficiencia y seguridad en la navegación autónoma. Además, la integración de sistemas de aprendizaje automático ha facilitado que los robots móviles aprendan y se adapten a su entorno, mejorando la toma de decisiones y optimizando su rendimiento en diferentes tareas y condiciones.

PRINCIPALES CARACTERÍSTICAS DE LOS ROBOTS MANIPULADORES
Una de las principales características de los robots manipuladores es su capacidad para manipular objetos de diferentes formas, tamaños y pesos con una precisión y una repetibilidad excepcionales. Esto los hace ideales para una amplia variedad de aplicaciones industriales, como el ensamblaje de productos, la manipulación de materiales en líneas de producción o la carga y descarga de mercancías en almacenes y centros de distribución.
Además, los robots manipuladores suelen estar equipados con una amplia gama de sensores, como cámaras, sensores de fuerza y sensores de proximidad, que les permiten adaptarse a la tarea de manera eficiente. Estos sensores pueden utilizarse para detectar la presencia de objetos y obstáculos, medir fuerzas y torques durante la manipulación y ajustar dinámicamente la trayectoria y la velocidad del robot en función de las condiciones del entorno.
Otra característica importante de los robots manipuladores es su capacidad para trabajar en entornos adversos y peligrosos para los humanos. Por ejemplo, los robots manipuladores se utilizan comúnmente en aplicaciones de soldadura, pintura y desmantelamiento nuclear, donde pueden operar de forma segura en entornos con altas temperaturas, radiación o productos químicos peligrosos.

ROBÓTICA COLABORATIVA: MEJORANDO LA INTERACCIÓN HUMANO-ROBOT
Las tareas colaborativas en el ámbito de la robótica se refieren a aquellas actividades en las que los robots trabajan en estrecha colaboración con seres humanos u otros robots para lograr un objetivo común. Estas tareas implican una interacción activa, coordinada y segura entre los diferentes agentes involucrados, ya sea compartiendo información, recursos o espacio físico, con el fin de realizar una tarea de manera eficiente.
La colaboración en robots manipuladores puede darse en diversas formas:
-
- Colaboración humano-robot: los manipuladores móviles trabajan junto a las personas para realizar una tarea específica. Esto puede referirse a la realización conjunta de tareas de manipulación física o a realizar tareas independientes pero compartidas en un mismo espacio de trabajo.
- Colaboración entre robots: los robots manipuladores también pueden colaborar entre sí para llevar a cabo tareas complejas que requieren la combinación de diferentes habilidades. Por ejemplo, varios robots pueden explorar y mapear un entorno desconocido o coordinarse para las diferentes etapas de entrega de productos en un almacén automatizado.
Así, la robótica colaborativa está destinada a mejorar la eficiencia, la precisión y la seguridad en una amplia gama de aplicaciones industriales y de servicio. Esto abre nuevas oportunidades para la automatización y la mejora de procesos en diversos sectores, al tiempo que garantiza un entorno de trabajo seguro y colaborativo para los trabajadores.
ROBOTS MANIPULADORES COLABORATIVOS: RETOS Y SOLUCIONES
La manipulación móvil colaborativa ha experimentado una evolución notable en los últimos años avanzando en aspectos tan importantes como la sensorización, localización, precisión o alcance. No obstante, todavía hay retos que afrontar y mucho margen de mejora por parte del sector de la robótica.
¿Cómo pueden optimizarse los robots manipuladores para ejecutar tareas colaborativas con humanos?
Para lograr una colaboración efectiva y segura, es necesario abordar un enfoque holístico que compete al diseño, configuración y seguridad.
-
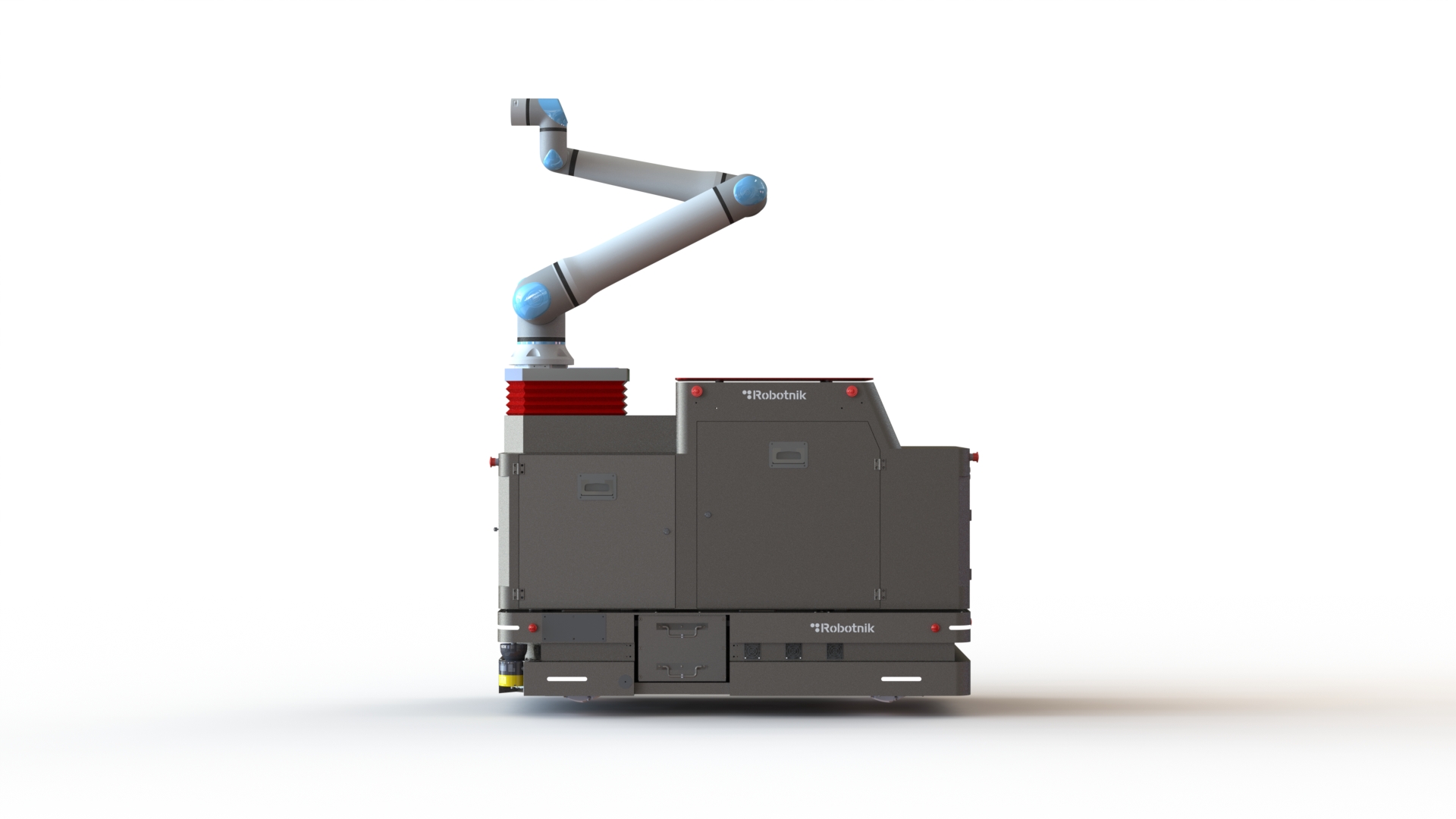
- Capacidad operativa: los manipuladores móviles disponibles en el mercado cuentan con una capacidad de carga limitada en el brazo manipulador. El manipulador móvil con mayor capacidad de carga que existe actualmente es el RB-ROBOUT+ de Robotnik que integra el brazo UR20 y puede manipular piezas de hasta 20 kg.
- Interfaces intuitivas: para facilitar la interacción entre humanos y robots, es importante desarrollar interfaces intuitivas y fáciles de usar. Esto puede incluir pantallas táctiles, paneles de control simplificados o incluso sistemas de control basados en gestos o voz, que permitan a los operadores humanos comunicarse con el robot de manera natural y sin la necesidad de una formación previa demasiado complicada.
- Sensores avanzados: equipar los robots con sensores avanzados como cámaras y sistemas de visión artificial, es fundamental para que puedan percibir y comprender su entorno de manera precisa. Estos sensores permiten al robot detectar obstáculos y ajustar su comportamiento en consecuencia, lo que es esencial en entornos dinámicos.
- Planificación de trayectorias seguras: los algoritmos de planificación de trayectorias juegan un papel crucial en la colaboración humano-robot. Estos algoritmos deben tener en cuenta la presencia de humanos en el entorno y optimizar la trayectoria del robot para evitar colisiones y minimizar los riesgos de lesiones.
¿QUÉ TAREAS PUEDEN AUTOMATIZAR LOS ROBOTS MANIPULADORES MÓVILES?
Los robots manipuladores móviles son altamente versátiles y, a medida que la tecnología avanza, pueden realizar una gama más amplia de tareas en diferentes entornos. Estas son algunas de las tareas que estos robots pueden ejecutar:
-
- Logística y transporte de materiales: los robots manipuladores pueden transportar materiales y productos de un lugar a otro en diferentes puntos dentro de almacenes, centros de distribución y fábricas. Por ejemplo, la recogida de piezas en un área de almacenamiento y el traslado a un punto de la cadena de suministro.
- Picking y packing automatizado: con la configuración y sensorización adecuada, estos robots seleccionan y recolectan productos en almacenes para su posterior empaquetado. Por ejemplo, un robot móvil puede navegar por un almacén, identificar productos en estantes y recogerlos para colocarlos en contenedores de envío según los pedidos de los clientes.
- Control de calidad: automatizar la inspección y control de calidad libera a los equipos humanos de una importante carga de trabajo que resulta repetitiva y mecánica. La repetibilidad de un brazo robótico garantiza precisión y fiabilidad para detectar fallos o piezas defectuosas. Al equipar un robot manipulador móvil con un efector final como una cámara de visión, lo capacitas para realizar inspecciones de seguridad y calidad en entornos industriales.
- Asistencia en hospitales y centros de atención médica: un robot móvil resulta de gran ayuda en la asistencia en hospitales o centros sanitarios al automatizar tareas logísticas como el transporte de suministros médicos, entrega de medicamentos a pacientes o ayudando en la entrega de muestras biológicas en laboratorios.

TENDENCIAS DE FUTURO DE LOS ROBOTS MANIPULADORES
La innovación tecnológica permite que la manipulación móvil amplíe el abanico de aplicaciones. Esto implica también que las tareas que automatiza el brazo manipulador, sean cada vez más precisas, constantes y complejas.
Otro de los avances importantes es el aumento en la oferta de componentes y efectores finales que se pueden integrar en el brazo robótico, dependiendo de la tarea que se desee automatizar. Aquí puede encontrar algunas de las opciones disponibles en el mercado.
La tendencia en el sector señala un constante incremento en manipulación móvil colaborativa, que cobra cada vez mayor protagonismo por su naturaleza versátil, flexible y segura.
En conclusión, los manipuladores robotizados ofrecen una serie de ventajas tangibles en términos de eficiencia operativa, calidad del producto y seguridad en el lugar de trabajo. Su capacidad para realizar tareas repetitivas con una precisión milimétrica los convierte en activos valiosos en entornos de fabricación altamente exigentes. Además, la integración de sensores avanzados y sistemas de visión artificial permite una detección y corrección de errores en tiempo real, lo que resulta en una reducción significativa de residuos y los costos asociados. En términos de seguridad, los manipuladores robotizados pueden asumir tareas peligrosas o tediosas, protegiendo a los trabajadores humanos de lesiones y mejorando la calidad de vida laboral. A medida que avanzamos hacia la industria 4.0, se espera que la demanda de manipuladores robotizados continúe creciendo, especialmente en sectores como la automoción, la electrónica y la logística. Con la continua innovación en materiales, diseño mecánico y control de sistemas, los manipuladores robotizados están preparados para desempeñar un papel aún más integral en la optimización de los procesos industriales y la creación de entornos de trabajo más seguros y eficientes.
Preguntas frecuentes sobre robótica
Un manipulador móvil es un tipo de robot que aúna las capacidades de manipulación de objetos de un brazo robótico con la movilidad de una plataforma móvil en un mismo dispositivo.
Pick & Place, control de calidad, ensamblaje, transporte de piezas, atornillado, taladrado o tareas logísticas, entre otras muchas.
¿Qué es la robótica colaborativa? Robótica colaborativa es la que permite que robots y humanos trabajen juntos compartiendo tareas o espacio de trabajo, de manera segura y eficaz.
¿LISTO PARA AGILIZAR LAS TAREAS DE GESTIÓN EN VARIAS UBICACIONES?
Póngase en contacto con nuestro equipo para obtener asesoramiento experto.
