

Robots customizados para la industria
Una de las tendencias más destacadas en robótica industrial es la personalización de robots que se adapten a…

AMR (Robots Móviles Autónomos) en diversos sectores
Los Robots Móviles Autónomos (AMR, por sus siglas en inglés) han abierto un abanico de oportunidades en una variedad de…

Usos de un robot manipulador móvil: más que un brazo robótico
La expansión de los brazos robóticos continúa, impulsada por la creciente necesidad de automatización en cada vez más…

Tendencias de robótica en 2025: Innovaciones que transformarán las industrias
El panorama de la robótica en 2025 es un ejemplo de cómo la innovación sigue redefiniendo las industrias. La robótica…

Preguntas frecuentes sobre robótica, aprendizaje profundo e inteligencia artificial
La convergencia de la robótica y el aprendizaje profundo impulsa las industrias al crear máquinas más inteligentes y…

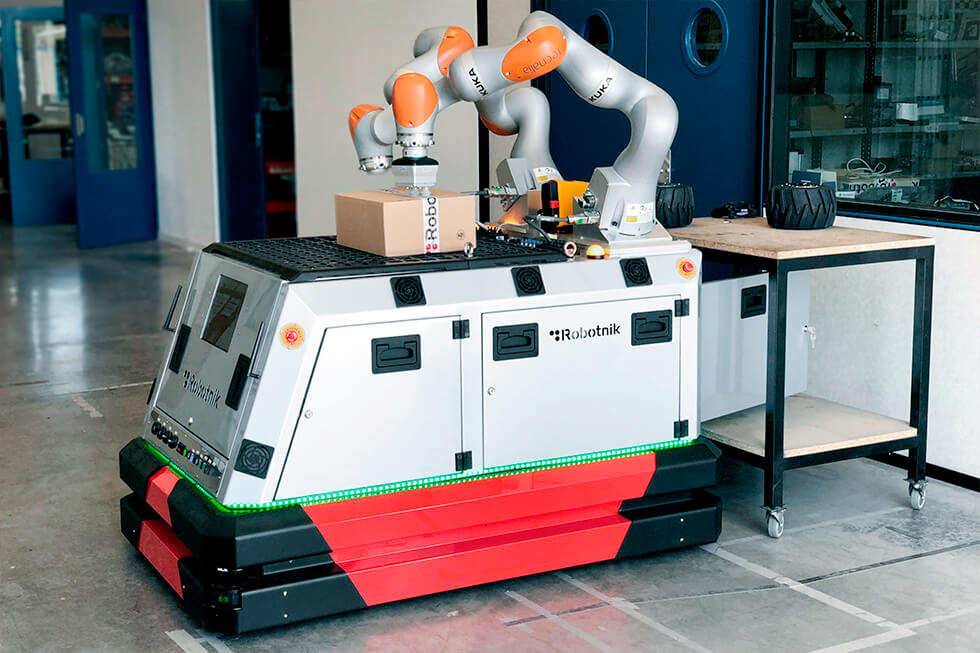
Manipuladores móviles: Combinación de movilidad y manipulación para múltiples entornos
La navegación autónoma de los AMR (Robots Móviles Autónomos) y la manipulación de brazos robóticos son tecnologías…

RB-WATCHER: El robot móvil autónomo para seguridad y vigilancia en los puertos
El robot de vigilancia RB-WATCHER para mejorar la seguridad de entidades portuarias: el caso de uso de Robotnik en el…

Robótica para el control de stock: el siguiente nivel en los almacenes
Una de las áreas que más ha cambiado dentro de la industria logística es el control de stock. La automatización del…

Innovaciones en automatización de almacenes: Sistemas de almacenamiento automatizado
La automatización de almacenes no es, en absoluto, un concepto nuevo. Sin embargo, ahora hablamos de tecnologías para…

Las 50 preguntas más frecuentes sobre manipuladores móviles: Robótica de precisión para múltiples entornos
Tras el éxito de la lectura de la «Guía completa de manipuladores robóticos: ventajas y aplicaciones», aquí le…