


ROS 2 (Robot Operating System): visión general y puntos clave del software de robótica
Desde hace más de una década, ROS (Robot Operating System) se ha consolidado como el entorno de referencia para el…

¿Qué lenguaje de programación usan los robots?
Todo dispositivo electrónico o máquina requiere de un idioma tanto para moverse como para comunicarse con otros…
¿Aprender ROS online? Es posible gracias a la colaboración de Robotnik y The Construct
Al hablar de robótica móvil autónoma, es inevitable hablar de ROS. El framework ROS ha sido uno de los mayores avances…

ROS Control: la clave para consolidar ROS en la industria robótica
El software ROS ha sido uno de los mayores avances de la industria de la robótica en los últimos años. Se trataba de…

Robotnik, patrocinador premium del 3er ROS Developers Day
Robotnik patrocina el 3er ROS Developers Day (* anteriormente llamado "Conferencia de Desarrolladores ROS"), un evento…

El CEEI otorga un galardón a Robotnik
Roberto Guzmán, CEO de Robotnik, recogió el galardón durante la gala de celebración del 25 aniversario del CEEI El…

ROS CONTROL, an API to control them all
ROS has been one of the greatest advances of the robotics industry in the past years. Its development began as a way to…

Robotnik participará en la Global Robot Expo 2017
La feria Global Robot Expo se consolida como un referente del sector en Europa. Robotnik asiste como expositor, junto…

ROS Components, porque robótica significa ROS
ROS Components es una división del grupo Robotnik Automation, empresa líder en Robótica de Servicio en Europa. El…
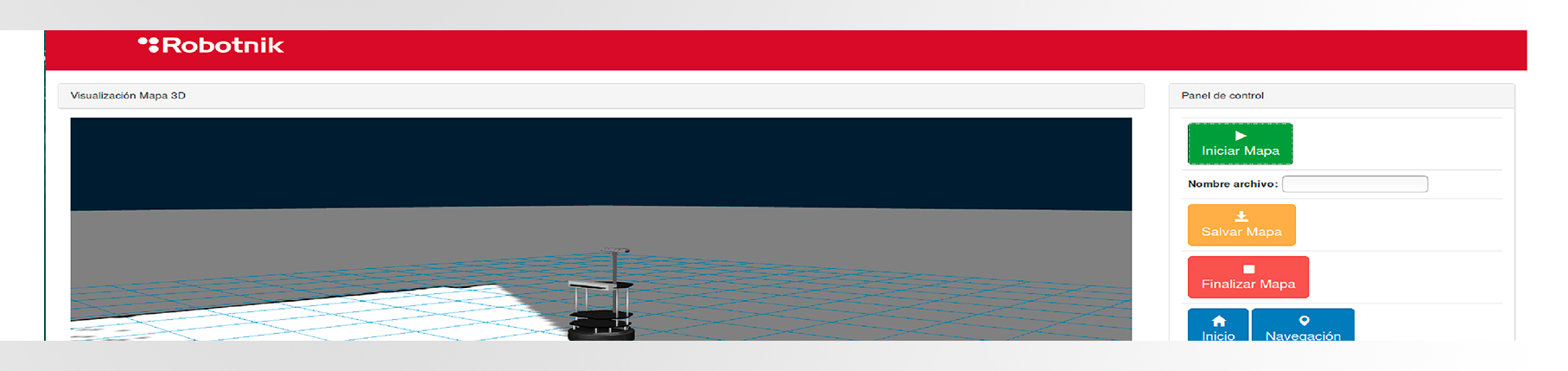
Robotic web applications
ROS is a great tool to develop new robotic applications. Its ease of use and its large amount of tools and wide…