

Una de las grandes diferencias entre los robots móviles autónomos y los tradicionales AGV es que, los primeros, no necesitan de referencias físicas para guiarse, como cintas magnéticas o balizas. Por lo tanto, la navegación de los AMR requiere de sistemas tecnológicos avanzados que garanticen un movimiento inteligente y seguro.
La navegación en robótica móvil es la tecnología que capacita a los robots para desplazarse de forma autónoma de un punto a otro, tanto en entornos de interior como de exterior. Este proceso implica conocer su posición actual, construir un mapa del entorno, planificar la ruta a seguir y controlar sus movimientos para llegar al destino deseado, mientras ejecutan la tarea para la que han sido diseñados.
Este artículo aporta una visión genérica de navegación autónoma y robótica móvil, así como algunas claves del punto tecnológico del mapeo y localización, todo desde la experiencia de Robotnik, tras más de 20 años como fabricantes de robótica móvil autónoma.
¿QUÉ ES LA NAVEGACIÓN AUTÓNOMA APLICADA A ROBÓTICA MÓVIL?
De manera muy resumida, la navegación autónoma es la capacidad que tiene un robot móvil para desplazarse de forma independiente desde un punto inicial hasta un destino predeterminado, sin intervención humana directa durante el trayecto. Este proceso involucra varias etapas clave:
- Mapeo: El robot crea o utiliza un mapa para entender el espacio físico y planificar rutas.
- Localización: Después de modelar el entorno, el robot debe conocer en todo momento y con precisión, en qué posición se encuentra dentro del mismo.
Tradicionalmente, las tareas de mapeo y localización se llevan a cabo de manera sucesiva pero, en la actualidad, algunos fabricantes como Robotnik, incorporan tecnología de Localización y Mapeo Simultáneos – SLAM, que permite al robot mapear el entorno mientras se mueve a la vez que estima su posición.
- Planificación de ruta: en base al mapa y la posición actual, el robot calcula la mejor trayectoria en cada caso para alcanzar su destino. La planificación de rutas es más inteligente a medida que se integran tecnologías como el Machine Learning u otros tipos de Inteligencia Artificial que posibilitan una toma de decisiones más actualizada y basada en patrones de aprendizaje contínuo.
- Movimiento y detección de obstáculos: Ejecutar la ruta calculada, controlando velocidad, dirección y maniobras para llegar al punto deseado, detectando y sorteando los posibles obstáculos estáticos o dinámicos.
Estas tareas requieren una combinación sofisticada de hardware y software, con sensores de alta precisión, algoritmos avanzados y sistemas de control robustos.
TECNOLOGÍAS CLAVE EN LA NAVEGACIÓN AUTÓNOMA
SLAM (Simultaneous Localization and Mapping) y LiDAR (Light Detection and Ranging) son tecnologías fundamentales en el desarrollo de sistemas de navegación autónoma. SLAM permite que un robot o vehículo autónomo construya un mapa del entorno mientras determina su propia ubicación dentro de él, todo en tiempo real.
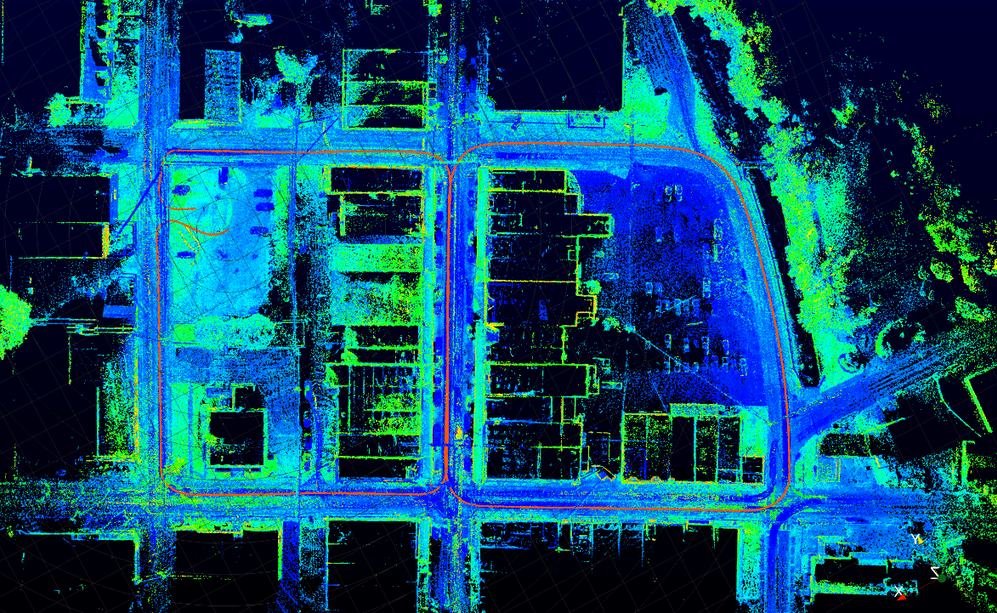
Por su parte, un sensor LiDAR utiliza pulsos de luz generando una nube de puntos del entorno, generando detalladas representaciones (bidimensionales o tridimensionales) del entorno. Combinadas, estas tecnologías permiten una percepción espacial precisa y confiable. A continuación se explican ambas:
SLAM (SIMULTANEOUS LOCALIZATION AND MAPPING)
La técnica SLAM (por las siglas en inglés Simultaneous Localization and Mapping) permite la localización y mapeo al mismo tiempo. Es decir, el robot no solo mapea su entorno, sino que usa ese mapa para saber dónde está exactamente en tiempo real. Este método es especialmente útil en entornos desconocidos o cambiantes donde no existen mapas previos.
En robótica es común el uso de SLAM 2D que, mediante sensores LiDAR 2D, construye mapas representando el entorno en un espacio bidimensional (x, y). Sin embargo, los robots de Robontik ya incluyen un módulo 3D SLAM basado en ROS que permite a robots con lidares 3D mapear entornos y localizarse en ellos. A diferencia del SLAM 2D, que solo captura información a la altura del sensor, el SLAM 3D proporciona una representación completa del entorno, incluyendo estructuras a distintas alturas. Esto mejora notablemente la precisión en la localización, la robustez frente a cambios y la eficiencia en la planificación de trayectorias, gracias a la mayor cantidad de datos y a la capacidad de los sensores 3D para evitar oclusiones.

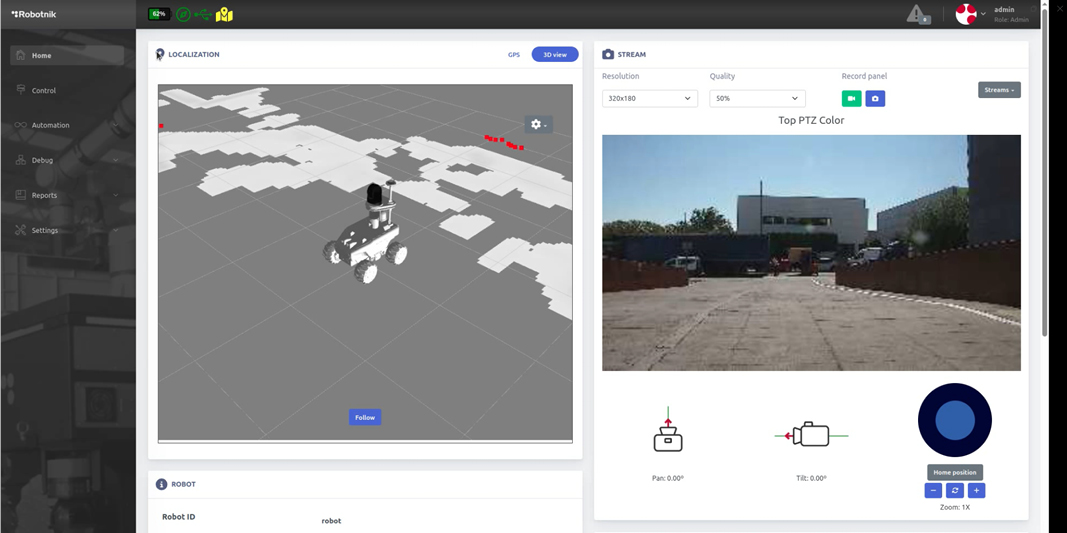
¿CÓMO FUNCIONA SLAM?
SLAM actúa como los ojos del robot. Es decir, detecta y recopila datos e información del entorno mediante sensores LiDAR, cámaras o IMU (Unidades de Medición Inercial). Estos datos son procesados para:
- Detectar características del entorno (paredes, puertas, muebles, obstáculos…).
- Crear un mapa digital en tiempo real basado en esos datos.
- Comparar lecturas nuevas con el mapa generado para estimar la posición del robot.
TIPOS DE SLAM
En robótica, la tecnología SLAM se puede clasificar principalmente en dos tipos: SLAM visual y SLAM basado en LiDAR.
- Visual SLAM: El SLAM Visual o vSLAM usa cámaras en lugar de láseres para capturar características visuales y construir los mapas a partir de ellas. Puede ser monocular (una cámara), estéreo (dos cámaras) o RGBD (cámara de profundidad). Esta técnica suele ser más económica aunque presenta ciertas limitaciones en casos con una iluminación variable.
- LiDAR SLAM: Emplea sensores LiDAR para obtener mapas detallados mediante pulsos láser. El LiDAR SLAM es altamente preciso y menos susceptible a los cambios de iluminación, siendo efectivo en condiciones de poca luz o oscuridad total.

DESAFÍOS EN LA NAVEGACIÓN AUTÓNOMA DE ROBOTS MÓVILES: ASÍ SE ABORDAN
El mapeo, la localización y la navegación son algunos de los mayores desafíos en la robótica móvil autónoma, especialmente para los AMR diseñados para entornos exteriores. En Robotnik, centramos gran parte de nuestros esfuerzos en desarrollar y mejorar continuamente estas capacidades para ofrecer soluciones cada vez más robustas, adaptativas y confiables en escenarios variados.
La tecnología de navegación autónoma enfrenta tanto obstáculos técnicos como operativos, los cuales se intensifican en entornos dinámicos, complejos y no estructurados. Aunque ha habido un avance significativo en este campo, aún existen muchas áreas con margen de mejora. Algunos de los desafíos más relevantes son:
PERCEPCIÓN DEL ENTORNO
- Desafío: Los robots deben percibir e interpretar con precisión su entorno utilizando sensores como cámaras, LiDAR, radares y sensores ultrasónicos. Las condiciones variables de iluminación, el polvo, el clima adverso o las superficies reflectantes pueden degradar la calidad de los datos.
- Solución: La fusión de sensores, los algoritmos de procesamiento avanzados y los modelos de IA entrenados para condiciones variables mejoran considerablemente la robustez y la fiabilidad de la percepción.
PLANIFICACIÓN DE RUTAS
- Desafío: Diseñar trayectorias óptimas en tiempo real es especialmente complejo en entornos dinámicos, donde el robot debe anticiparse y reaccionar ante obstáculos en movimiento como personas o vehículos.
- Solución: Algoritmos de planificación dinámica y modelos predictivos que recalculan rutas en milisegundos, optimizando tanto la seguridad como la eficiencia.
EVITACIÓN DE COLISIONES
- Desafío: Detectar y evitar obstáculos en tiempo real, especialmente en espacios estrechos o concurridos, es un reto constante. Los errores de los sensores o los retrasos en el procesamiento pueden comprometer la seguridad del sistema.
- Solución: Los robots emplean sistemas de detección redundantes, controladores reactivos y planificación local basada en IA para ejecutar maniobras evasivas rápidas y precisas.
ADAPTABILIDAD Y APRENDIZAJE
- Desafío: Los entornos reales son altamente variables e impredecibles. La capacidad del robot para aprender y adaptarse a nuevas situaciones es esencial para una navegación segura y eficaz.
- Solución: Los sistemas de navegación modernos integran algoritmos de aprendizaje automático y aprendizaje por refuerzo, lo que permite mejorar el rendimiento a través de la experiencia, adaptarse a los cambios del entorno y adquirir nuevos patrones de comportamiento.
COMPUTACIÓN EN TIEMPO REAL
- Desafío: La toma de decisiones autónoma requiere procesar grandes volúmenes de datos de sensores en milisegundos, integrando percepción, planificación y control sin generar latencia.
- Solución: Arquitecturas de hardware optimizadas (por ejemplo, GPUs, edge computing) combinadas con software altamente eficiente permiten la ejecución en tiempo real de operaciones críticas.
SEGURIDAD
- Desafío: La seguridad es fundamental, especialmente en entornos colaborativos donde los robots interactúan con humanos. Cualquier fallo en la navegación puede poner en riesgo tanto a los usuarios como al sistema.
- Solución: Sistemas de seguridad activos y pasivos, protocolos de parada de emergencia, simulaciones previas al despliegue y comportamientos certificados garantizan un funcionamiento predecible y fiable incluso ante condiciones imprevistas.

FUTURO DE LA NAVEGACIÓN AUTÓNOMA EN ROBOTS MÓVILES
La navegación autónoma representa uno de los pilares fundamentales en el desarrollo de la robótica móvil, y su evolución marcará el rumbo de múltiples sectores industriales, logísticos y de servicios. En los próximos años, se prevé una transformación significativa impulsada por la integración de tecnologías más avanzadas, capaces de dotar a los robots de una mayor inteligencia, precisión y adaptabilidad.
Uno de los avances más prometedores es la fusión avanzada de sensores, que combina datos de LiDAR, cámaras, sensores de ultrasonido e IMU para ofrecer una percepción más robusta y precisa del entorno. Esta integración permite a los robots interpretar mejor escenarios complejos, incluso en condiciones ambientales adversas.
Otro punto clave es el desarrollo de sistemas SLAM potenciados por inteligencia artificial, donde redes neuronales y algoritmos de aprendizaje profundo optimizan el mapeo y la localización en tiempo real. Esto es especialmente útil en entornos dinámicos y no estructurados, donde los métodos tradicionales pueden fallar.
Además, el futuro de la navegación autónoma pasa por la colaboración multi-robot, permitiendo que flotas de robots compartan información sobre mapas, obstáculos y rutas. Esta cooperación no solo mejora la eficiencia operativa, sino que también abre la puerta a tareas coordinadas en tiempo real, como la logística de última milla o la automatización de grandes almacenes.
Por último, la autonomía energética se vuelve un factor esencial. Nuevos sistemas de gestión y recarga inteligente permitirán extender significativamente el tiempo operativo de los robots, reduciendo interrupciones y aumentando la productividad.
En conjunto, estas tendencias están dando forma a una nueva generación de robots móviles más autónomos, seguros y colaborativos. En Robotnik, trabajamos continuamente para incorporar estas innovaciones en nuestras soluciones, comprometidos con ofrecer a nuestros clientes tecnologías que respondan a las demandas actuales y se anticipen a los desafíos del futuro próximo.
Preguntas frecuentes sobre la róbotica en la industria aeroespacial
Los robots móviles realizan tareas de alta precisión como inspecciones dimensionales, tratamientos de superficie y ensamblaje de componentes, garantizando calidad y seguridad.
Mejoran la repetibilidad, ahorran tiempo, no requieren de modificaciones en la planta y aumentan la seguridad gracias a la colaboración humano-robot.
Utilizan sistemas de escaneo 2D/3D para moverse de forma autónoma sin marcas en el suelo ni guías físicas.