


The transformative role of AI in autonomous mobile robots
Artificial Intelligence (AI) and Robotics are two cutting-edge technologies at the forefront of development in recent…

Is it really safe to share workspace between robots and humans? Robotnik in the HR-RECYCLER project
Industry 4.0 and smart factories are a favorable framework for companies that want to grow. Technological sector,…
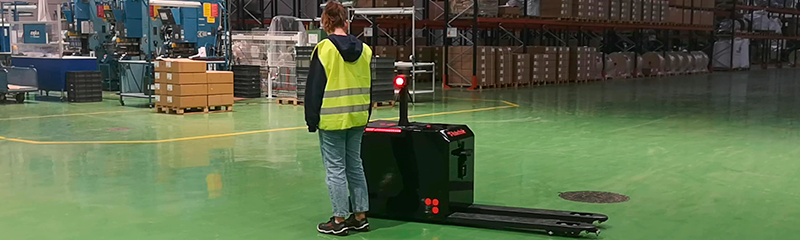
Mobile robots and safety: the experience of Robotnik in HR-RECYCLER project
Collaborative robots have come front and center on the international stage as they’ve become widespread in Industry…

Prosthetic research with Barrett Hands and WAM arms
A hand with a sense of touch it's something that amputees and prosthetic hand researchers have been acutely aware of…

NAO News
UNCW formed a new autism research committee to explore how the ‘Humanoids' may be used to help autistic children…

Euron
Robotnik is a new member of EURON, the "European Robotics Research Network" . EURON is a community of people with a…