

Industry 4.0 and smart factories are a favorable framework for companies that want to grow. Technological sector, particularly collaborative robotics, is always developing to respond to the new challenges that this context presents.
New challenges
As Ángel Soriano said in this interview, ‘one of the main challenges we face in the development of R&D projects are the dynamic and unpredictable environments. It is one of the most critical factors when offering a solution applicable to different scenarios or use cases’.
Faced with these changing and dynamic scenarios, it is necessary to offer maximum safety so that robots and humans can operate with full guarantees.
This post shows how speed adapts to the environment so that the robot accomplishes its mission as quickly as possible while maintaining system safety.
Today’s AMRs are more powerful, more advanced and more productive, so safety has become a critical element and the key challenge for effective collaboration with workers.
HR-Recycler is an H2020 R&D project developing a hybrid human-robot recycling plant for the recycling of electrical and electronic equipment.
Robotnik, as hardware supplier, is in charge of developing new UAV concepts capable of handling material inside smart factories and pre-processing WEEE materials by automatic robotic procedures (categorization of electrical/electronic devices, disassembly, sorting of device components, etc.).
Safety is the key
For Robotnik, as an experienced robot manufacturer since 2002 and within the collaborative environment of the HR-Recycler project, this aspect is especially important as humans and robots will be working side by side.
Previous posts discuss the importance of safety focusing on the predictive/anticipatory side, i.e., signaling and how it is implemented in AMR’s. Safety also involves aspects such as collision avoidance, slowing down or stopping robots and the comfort of humans when an AMR is working around them.
But, how does this really work? How is Robotnik ensuring the safety of its robots?
Robotnik aims to ensure its robots through the accomplishment of the EN ISO 3691-4:2020, that is related to Industrial trucks — Safety requirements and verification — Part 4: Driverless industrial trucks and their systems.
For the accomplishment of the normative and besides the concrete reglaments of each country, this post gives to the reader a brief description about what, why and how the related to motion set of premises of the ISO will be reached.
At first, the robot should be properly designed to allow the system to reduce the velocity, stop the motion or modify its behaviour according to the environmental conditions, as it is included in the ISO mentioned above, the minimal hardware requirements in terms of ensuring the motion are:
- Braking system: The robot needs to be equipped with a braking system able to work when the robot is switched off and also able to stop the system when actuators are out of control.
- Speed control system: The robot needs to be equipped with a speed monitor system to send a stopping signal in case of overspeed. It also needs to be aligned and compliant with the stability of the platform.
- Steering control system: The robot needs to control the steering angle of the actuators to monitor the stability of the robot.
- Protective devices and complementary measures: To detect persons in the routes in automatic mode, the robots must be equipped with sensors that can detect persons and correctly installed to do that. If these devices cannot work in the movement direction the maximum velocity must be less than 0.3 m/s.
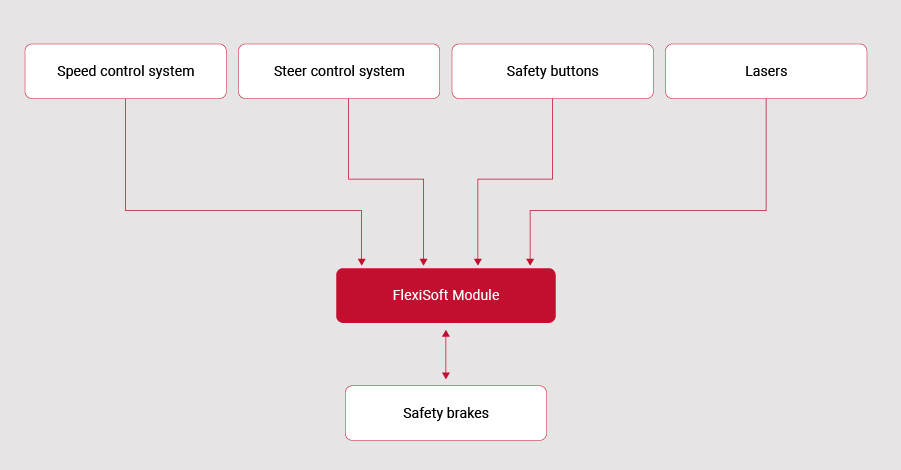
Once this part is already installed in the robot and properly integrated, the configuration and the control areas must be aligned with the robot capabilities. In order to check all the components, the robots have installed the safe PLC module, an adjustable modular safety controller for safety applications and the kernel of the monitoring process. The safety level actually achieved is determined by the external wiring, how the wiring is implemented, the configuration, the selection of command triggers, and how they are arranged on the machine.
In Robotnik’s robots, the wired and interaction direction goes as follows:
Configuration
The safe PLC communicates with the electromechanical brakes in order to trigger the safety and stop or reduce the velocity of the robot. The configuration depends on the design, function and working area of the robot. If personnel can access the shuttle path, certain safety conditions must be implemented in accordance with applicable standards so the robot must be able to update this safety level in real time:
- Laser areas: The used laser scanners can switch between two kinds of areas: the warning area, where the robot reduces its maximum velocity as a prevention; and the protective field where the robot stops its behaviour if something shuts it. Both fields are configured to increase proportionally to the velocity. The minimum distance of the protective field for the lowest maximum speed limit is 0.3m.
- Speed limit: The velocity limits are included as one of the conditions in the ISO to ensure that the robot will be able to stop before crashing and with a remaining distance, the limits can also be lowered to improve the stability of the base or load. The maximum velocity allowed must be less than 0.3m/s if the personnel detection systems (i.e. the laser scanners) are muted and only can be used by the specialized workers. If the robot is not working closer to people and it has large space to work the maximum speed is 1.2m/s with the personnel detection system active. The all-possible velocity cases are summarized in the following table:

- Steering angle: The direction of motion is also one of the conditions since the stability can be affected or the robot may have areas not covered by the safety.
Specific configuration
Two types of robots were designed for this project
- RB-KAIROS+, an omnidirectional platform mounted with a manipulator
- RB-ARES, a robotic pallet-truck
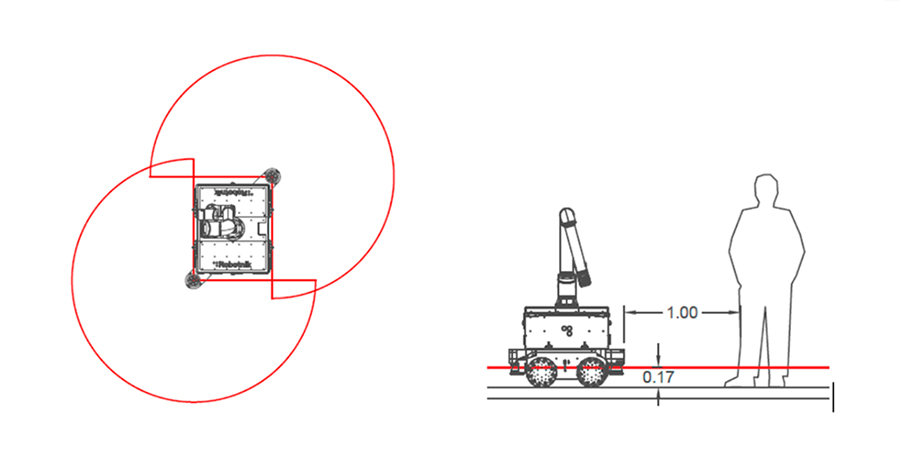
RB-KAIROS+ configuration has safety brakes, two accessible emergency buttons, a traction monitor system on each wheel and two 2D lasers installed and located in two of its corners. Scanners give the robot a 360º vision range of its environment. The vision range detects any obstacle located at a height of 170 mm from the ground that is the recommended height to detect the legs of the personnel. RB-KAIROS+ is configured, as standard, to activate the emergency stop by detecting an obstacle at a distance of 1000 mm. This configuration can be modified according to the environment or application to be carried out, as long as it does not compromise the safety of the users.
The robot has a predefined safety zone on the horizontal plane, determined by safety lasers detection. When an obstacle or a person is detected inside the safety zone, the RB-KAIROS+ will stop until the area is free again. The size of the safety zone depends on the speed of the mobile base:
When the base is static or has a speed below 0.15 m/s, the safety zone is the one detailed in the scheme below:
This area increases with the mobile base speed until reaching the maximum dimensions with a speed of 1m/s:
Once the maximum speed of 1.3m/s is reached, the platform stops for safety reasons.
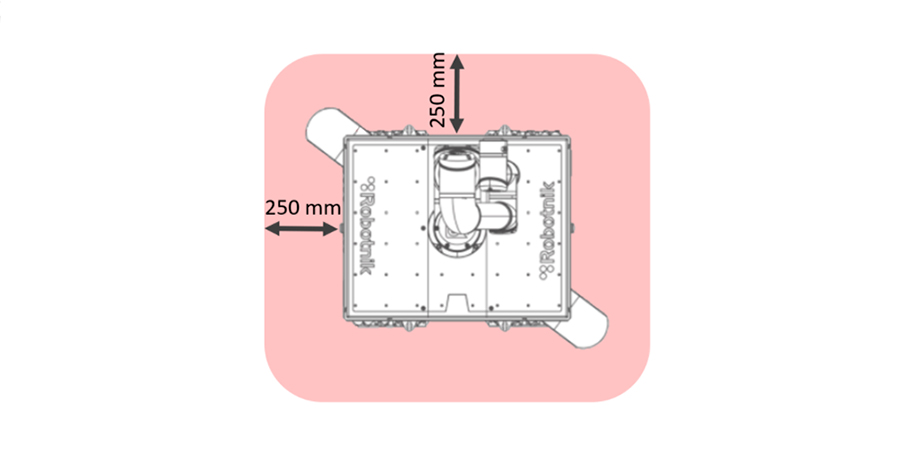
The pallet-truck, it is configured with the safety brakes, the steering and traction monitoring system and one single 2D laser installed and located in the front shape, which gives it a 270º vision range. The vision range detects any obstacle located at a height of 170 mm from the ground and it is configured to activate the emergency stop by detecting an obstacle at a distance of 250 mm.
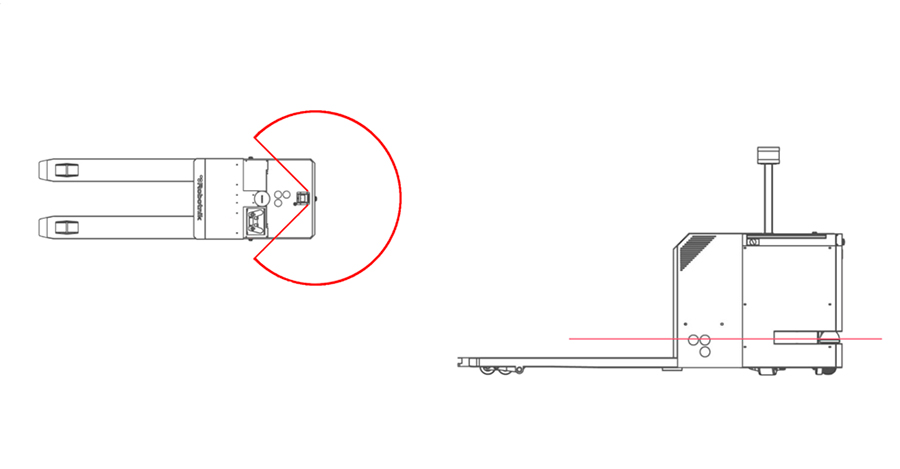
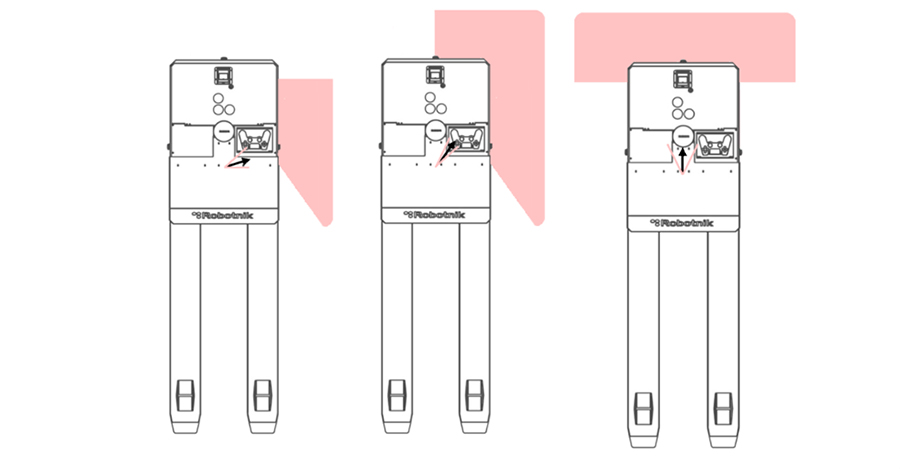
You can see how the robot has a predefined safety zone on the horizontal plane, determined by safety laser detection. The size of the safety zone depends on the speed vector of the mobile base, that is, its module, sense and direction of motion. Several small regions are defined and only the ones that are in the direction and sense of the motion vector are active.
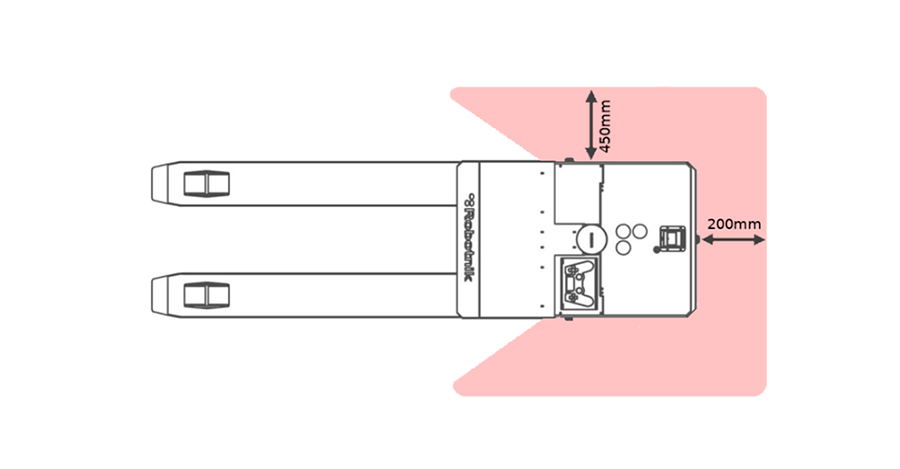
When the base is static or has a speed below 0.15 m/s, the safety zone is the one detailed in the scheme below:
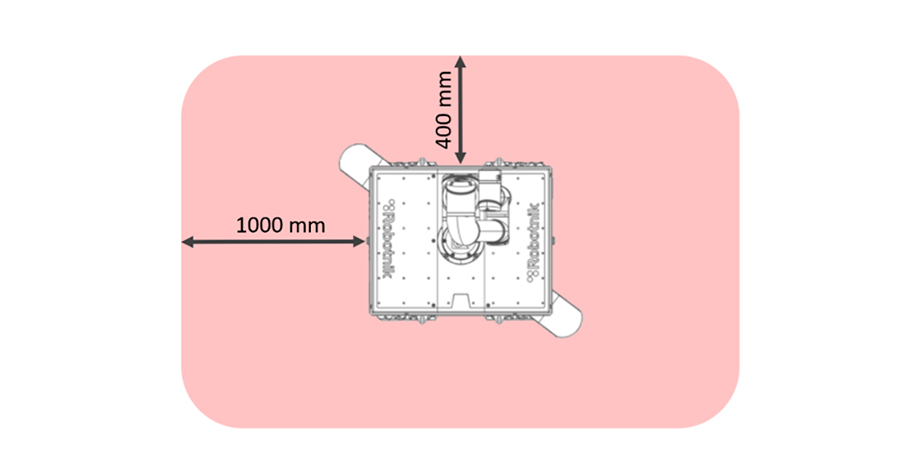
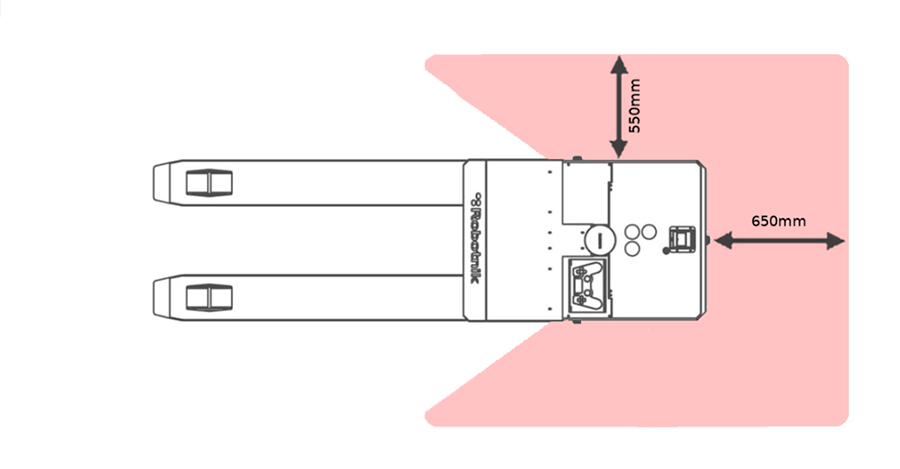
This area increases with the mobile base speed until reaching the maximum dimensions with a speed of 1.2m/s:
 Sumarizing
Sumarizing
 Sumarizing
SumarizingSafety is a crucial part that must be taken into account when designing an AMR that works in a collaborative scenario between humans and robots. Robotnik works to achieve a total synergy between components to build, develop robots capable of working safely between humans. This will represent an efficient and cost-effective solution for the company that bets on implementing robotics.
- Autonomous Robotics as a Strategic Infrastructure: The Challenge of Inspecting and Protecting Critical Systems - 10 February 2026
- Industrial robotics in 2025: trends, figures, and global outlook - 15 December 2025
- Artificial Intelligence for vision-based autonomous inspection - 27 November 2025