

Rodney Brooks, célebre por su labor pionera creando robots insectoides en el MIT (Instituto Tecnológico de Massachusetts, en Cambridge, Estados Unidos), y más tarde por el éxito de los robots domésticos de la empresa iRobot cofundada por él, no sabe estar sin hacer cosas nuevas, como toda mente creativa. Ahora, a través de la nueva empresa Rethink Robotics, está desarrollando robots que puedan adaptarse a labores de fabricación y al entorno de las fábricas, trabajando de modo seguro en ellas junto a personas y demostrando «sentido común».
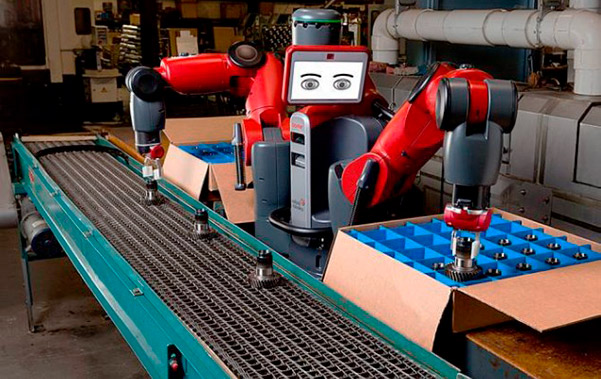
El primer modelo comercial de Rethink, llamado Baxter y en producción desde hace unos meses, es un robot de dos brazos y tamaño similar al humano que puede ser programado para aprender labores repetitivas de producción, que engloban, a grandes rasgos, manejo, comprobación y clasificación de componentes, ensamblaje de los mismos (excepto si pesan mucho), y las labores de empaquetar y desempaquetar. Cualquier trabajador, aunque no sepa mucho de tecnología, puede programar a Baxter mediante la estrategia fácil de mover los brazos de éste, demostrándole así al robot someramente las tareas y ubicaciones deseadas, y pulsando botones en un panel de control a fin de complementar la programación.
La «cara» del robot (los ojos y las cejas mostrados en una pantalla LCD) indica su estado y dónde está prestando su atención (la dirección de su «mirada» lo denota). En la «cabeza» del robot hay sensores que le permiten reconocer cuándo hay personas cerca. En sus articulaciones hay sensores que le permiten reducir la fuerza del impacto si detecta una colisión.
La buena capacidad de Baxter para percibir a los humanos en su entorno y evitar dañarles accidentalmente es una gran baza a su favor, en comparación con robots industriales más primitivos y potencialmente más peligrosos.
El diseño de Baxter no se hizo exclusivamente desde un laboratorio, sino también a partir de extensas observaciones en fábricas. Esta experiencia de campo llevó a Brooks y sus colegas a desechar muchos elementos para Baxter que al principio parecían útiles, como una interfaz de voz (porque las fábricas son ruidosas) y pantallas táctiles (porque bastantes trabajadores usan guantes).
Una vez decidido el diseño básico, el equipo de Brooks comenzó a reducir los costos de fabricación de Baxter reemplazando componentes mecánicos costosos con software más sofisticado. Un programa avanzado permite que el robot rectifique irregularidades mecánicas, como problemas con engranajes. Elementos relativamente simples como cámaras ayudan al robot a detectar objetos sin necesidad de una precisión motora tan perfecta como la que permite agarrar objetos sin verlos a los típicos y caros robots industriales de las cadenas de montaje.
Pese a todo, el hardware del robot cuenta con algunas cualidades impresionantes. Un componente clave (que permite al robot percibir y suavizar colisiones) fue inventado y patentado en el MIT: Los brazos de Baxter contienen un mecanismo que fue inventado por Gill Pratt, antes del MIT, y Matt Williamson, quien en su día fue alumno de Brooks.
Puestos a ver paralelismos entre la labor de Brooks para iRobot y su trabajo para Rethink Robotics, se podría decir que la filosofía de diseño de Baxter abaratará y extenderá los robots industriales como se ha hecho en el caso de Roomba (el célebre robot aspiradora) y otros de iRobot y de empresas similares posteriores para el creciente campo de la robótica doméstica.
- La robótica autónoma como infraestructura estratégica: el reto de inspeccionar y proteger sistemas críticos - 10 febrero 2026
- Robótica industrial en 2025: tendencias, cifras y perspectivas globales - 15 diciembre 2025
- Inteligencia Artificial para inspección autónoma basada en visión - 27 noviembre 2025