

For over a decade, ROS (Robot Operating System) has established itself as the reference environment for developing open-source robotic applications. Since its launch in 2007, its wide set of tools, libraries, and functionalities has made it an essential platform for engineers and developers around the world.
At Robotnik, we have supported this ecosystem from the very beginning, convinced that it is the most accessible, flexible, and powerful way to progress from prototyping phases to industrial solutions or final products.
Today, with the arrival of ROS 2, we are witnessing a natural evolution of the system, specifically designed to address the new challenges and demands of the modern robotics sector. In this article, we analyze the main differences between ROS and ROS 2, as well as their advantages, key functionalities, and the impact this transition has on mobile robotics.
WHAT IS ROS 2?
ROS, the Robot Operating System, is an open-source platform that provides software tools and libraries to facilitate the development of robotic applications.
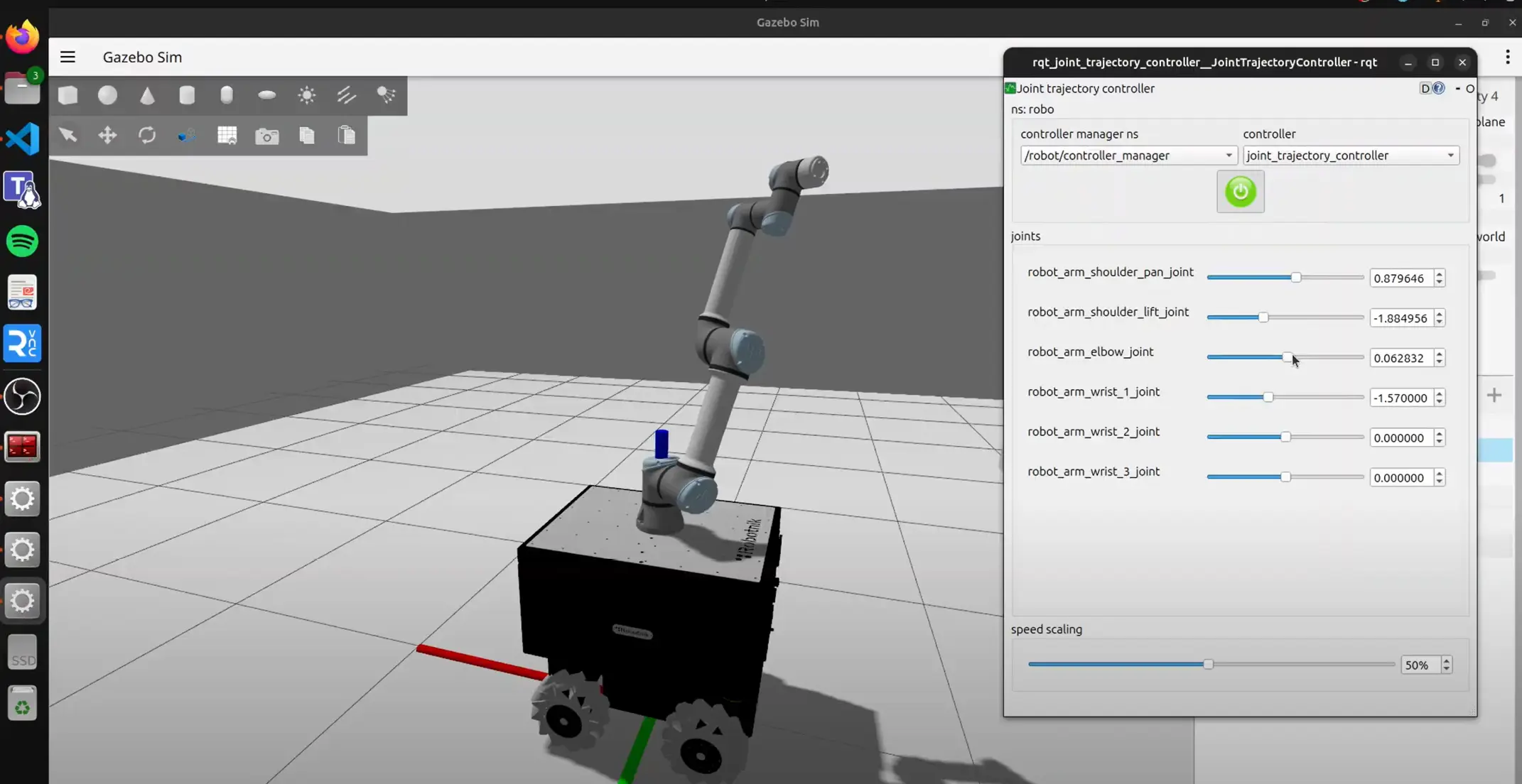
As described by Open Robotics: ROS is a software development kit that helps you build robot applications. From drivers to cutting-edge algorithms, and with powerful developer tools, ROS has everything needed for a robotics project, including integration with Gazebo. And it’s all open-source.
ROS 2 is the second version of the Robot Operating System, developed to address some of the limitations of the first and to provide improvements in several areas such as communication, compatibility with other operating systems, and performance.
UPGRADES OF ROS 2 OVER ROS 1
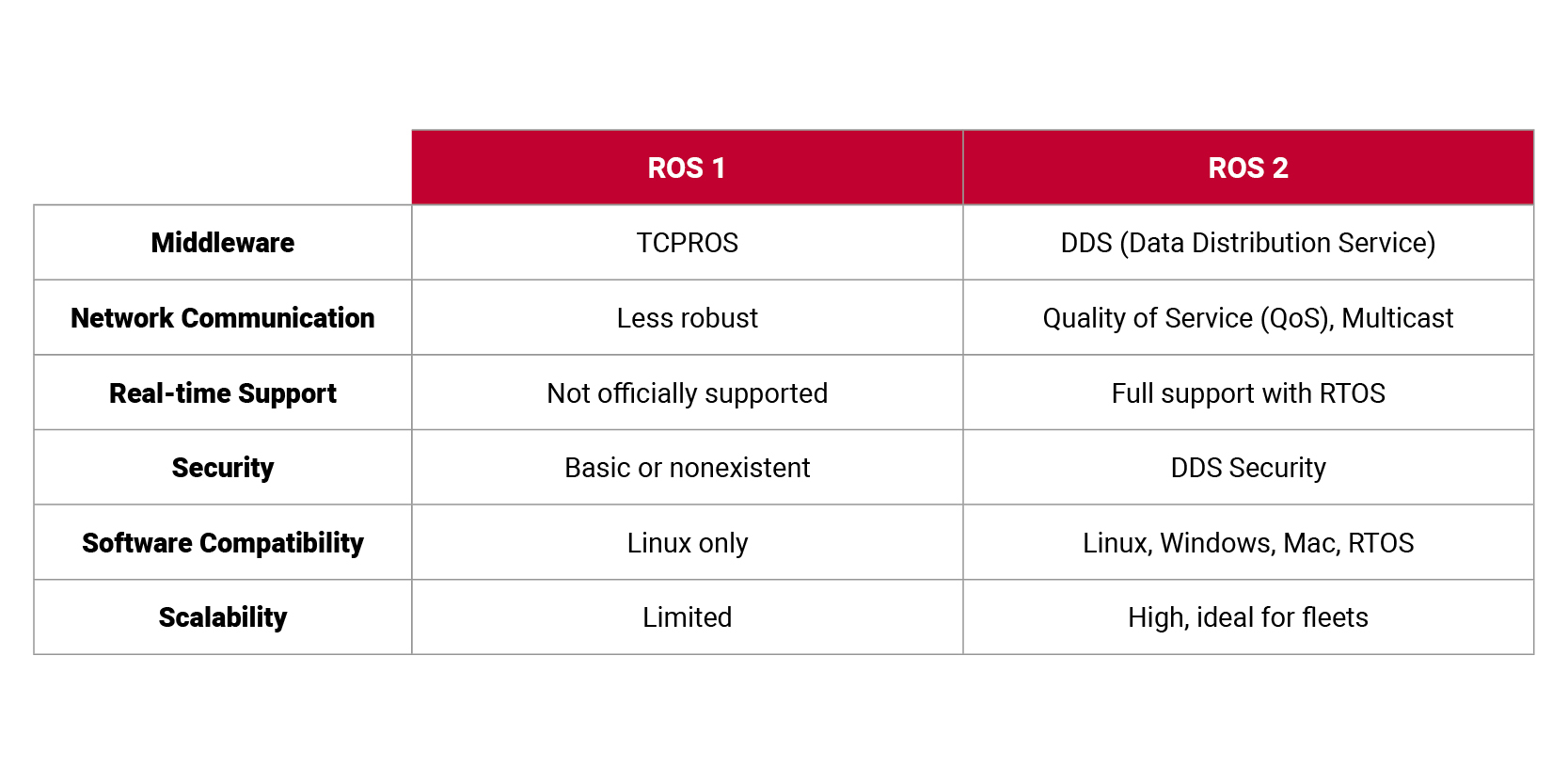
- Security Focus: ROS 2 includes authentication and encryption mechanisms to ensure secure communications, a key feature for developing critical or sensitive applications.
- Cross-platform Compatibility: Unlike its predecessor, ROS 2 works natively on major operating systems such as Linux, Windows, and macOS, broadening development options.
- Improved Communication System: ROS 2 incorporates Fast RTPS as the new communication middleware, based on the DDS (Data Distribution Service) standard. This enables more robust and efficient communication between distributed nodes, with support for Quality of Service (QoS) policies and compatibility with various transport protocols.
- Better Performance: ROS 2’s architecture has been optimized for improved real-time performance and greater scalability, overcoming the limitations of ROS 1.
- Multi-language Support: In addition to C++ and Python, ROS 2 also offers compatibility with Rust.
ROS 2 vs ROS 1: KEY DIFFERENCES
ADVANTAGES OF ROS 2
Beyond the improvements over ROS 1, this robotic software development framework offers the following user benefits:
- Faster Time-to-Market: ROS 2 provides a comprehensive set of tools, libraries, and features designed to simplify robotic application development, allowing developers to focus on strategic project aspects. As an open-source platform, it offers flexibility to tailor implementations to specific needs and customize according to user requirements.
- Industrial Design: Building on over a decade of experience that made ROS 1 the global R&D benchmark in robotics, ROS 2 was developed with a focus on industrial standards, paying special attention to the reliability and safety these standards require.
- Industry Support: As demonstrated by the participation of the ROS 2 Technical Steering Committee, industry backing for ROS 2 is strong. Companies of all sizes around the world, including Robotnik, are committed to contributing open-source code to ROS 2 and developing products based on it.
- Based on Open Standards: ROS 2’s default communication method uses industry standards such as IDL, DDS, and DDS-I RTPS, which are already widely implemented in various industrial applications, from factories to the aerospace sector.
- Permissive Open-Source License: ROS 2 is protected under the Apache 2.0 License, and some ROS 1 code is under the 3-clause BSD license (or "new" BSD). Both licenses allow legal use of the software without affecting the user's intellectual property.
WHY MIGRATE YOUR ROBOT FROM ROS 1 TO ROS 2?
Robotnik remains committed to ROS as the go-to open-source robotics software. With Open Robotics’ announcement that ROS 1 Noetic will stop receiving support in May 2025, the company recommends transitioning to ROS 2 as soon as possible. To facilitate this process, Robotnik offers solutions that make the migration simpler, safer, and more efficient.
There are two update options: One is remote assistance, where a specialized technician connects to the user’s system to perform the migration with real-time support. The other involves sending the robot to Robotnik’s facilities for a more complete upgrade, in which case the customer covers transportation costs.
To access this service, the robot must be included in the 2025 Robotnik product catalog. If not, it’s possible to evaluate the case individually to determine feasibility. It is also necessary to verify that sensors and components are compatible with ROS 2, as some may be discontinued or lack updated support. Additionally, the control PC specifications (processor, RAM, and storage) are reviewed to ensure they meet the new system requirements. If limitations are detected, hardware upgrades may be proposed.
HERE you can find all the information related to migrating your Robotnik robot to ROS 2, as well as a contact form for our team to handle any related inquiries.
EMPOWERING THE CAPABILITIES OF ROS 2
In conclusion, ROS 2 represents a significant advancement in robotics software development, addressing and overcoming many of the limitations found in ROS 1. Thanks to its open standards-based architecture, cross-platform support, security focus, and permissive open-source license, ROS 2 stands out as a robust, flexible platform ready for production environments.
Additionally, support from an active global community and strong industry backing further reinforce its continued evolution. Although it is still maturing, ROS 2’s potential to drive autonomous solutions across various industrial sectors makes it a solid option for the present and future of robotics. Its sustained growth promises an increasingly solid ecosystem, where collaboration among developers, researchers, and companies will remain the driving force behind innovation.
At Robotnik, we recommend that teams beginning new projects adopt ROS 2 directly as the foundation for their robotic applications, as it represents the future of the ROS ecosystem.
For organizations still working with ROS 1, it’s important to note that its official support will end in 2025, making it unsustainable in the long term. However, we understand that each company has different needs and timelines. Therefore, it is essential for each team to analyze the effort required for migration, assess available resources, and define a realistic transition plan to ROS 2. This plan should align with strategic goals and the product lifecycle, ensuring solid and uninterrupted technological evolution.
FAQs about ROS 2
ROS 2 integrates an improved communication system, supports more programming languages, among other enhancements. In addition, official support for ROS 1 will end in May 2025, so upgrading is essential to ensure technological sustainability.
ROS 2 includes industry standards-based communication (DDS), support for multiple operating systems, improved real-time performance, and a focus on safety.
Robotnik offers remote assistance with real-time support or the option to send the robot to its facility for a complete upgrade, if the model is included in its 2025 catalogue.
