


Robots to Re-Construction (BOTS2Rec)
The goal of BOTS2Rec is introducing, testing and validating an operational process for the automated removal of…

These robots will save our fields from the danger of pesticides
Future robots would spray pesticides only on plants that need them, unlike current practices that waste up to 99% of…

Robotics enabled the Spanish vineyard to optimize its competitiveness and sustainability
The Ministry of Agriculture, Fisheries, Food and Environment (Mapama), specified by resolution of August 10, 2017, the…

BADGER project, the autonomous underground robotic system
Robotnik participates at the BADGER project, whose goal is the design and development of the BADGER autonomous…

Radio Project Eu progresses in Ambient Assisted Living
RADIO Project technical partners hold meeting in Nafpaktos, Greece. Teams are checking progress in the new ambient…

INJEROBOTS for solving horticultural problems in grafting seedlings
INJEROBOTS is an innovative beginning in the automation of grafting seedlings. The european project aims the…

Robotnik obtains the Innovative SME Seal from the Economy Ministry
This recongnition shows the innovative philosophy of the company The Spanish Ministry of Economy and Competitiveness…
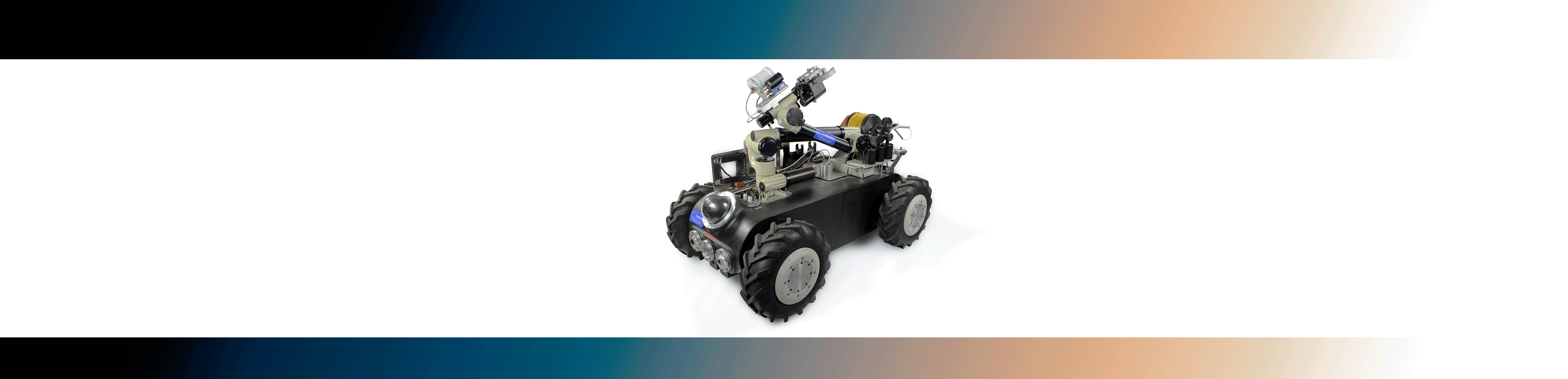
Robotics in Harsh Environments
In the field of hostile conditions, space is often considered as the harsh environment at its height. However, it’s not…
BOTS2REC, robotic system for the automated removal of asbestos contamination
Bots2Rec project is a robotic system used for the automated removal of asbestos contamination. It will consist of…

SUMMIT XL STEEL: Steel resistance
Robotnik has officially launched its mobile platform SUMMIT-XL STEEL. This is the new member of the family SUMMIT XL,…