

INJEROBOTS is an innovative beginning in the automation of grafting seedlings. The european project aims the development of a complete and integrated robotic solution in the horticultural field.
The project forms part of the European Coordination Hub of Open Robotics Development (ECHORD ++) funded under the Seventh Framework Programme for Research and Technological Development (FP7).
Robotnik with the support of Tecnova and Ingro Maquinaria will work together to develop the robotics system. Robotnik is responsable for the communication and extending of the advanced capabilities of ROS software.
The system
The robotic system will undertake automated processes with different species of plants by using an industrial dual arm robot for grafting and machine visión for analytics and quality control of the system operating. The objective is to develop a flexible and universal system for automated graft seedlings, based on anthropomorphic robots.
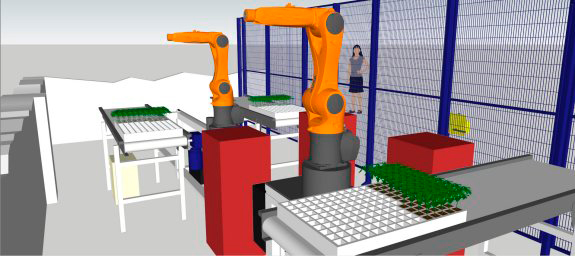
The application
The development will consist of two robots with artificial vision system. They will work independently and in perfect coordination, and the grip will provide an accurate and precise development. Once the rootstock and the stem of the plant are subjected, they will be displaced in a coordinated manner to an area where two automatic knives will rid of non-useful parts, like the bottom in the seedling stem and top of the seedling located on the rootstock. After cutting, each of the robots will accurately move the stem and rootstock to a common point for assembly. Following this and as a final step, one of the robots, or both, will deposited on a new tray.

The aim
INJEROBOTS will be a robotic solution with the introduction of new equipment and techniques to solve horticultural problems and needs of plant nurseries and farmers. This experiment will improve the performance and efficiency and reduce costs and human labour involved.