


ROS CONTROL, an API to control them all
ROS has been one of the greatest advances of the robotics industry in the past years. Its development began as a way to…

ROS Components, because robotics means ROS
ROS Components is a division of Robotnik Automation Group, leading company in the European service robotics market. The…
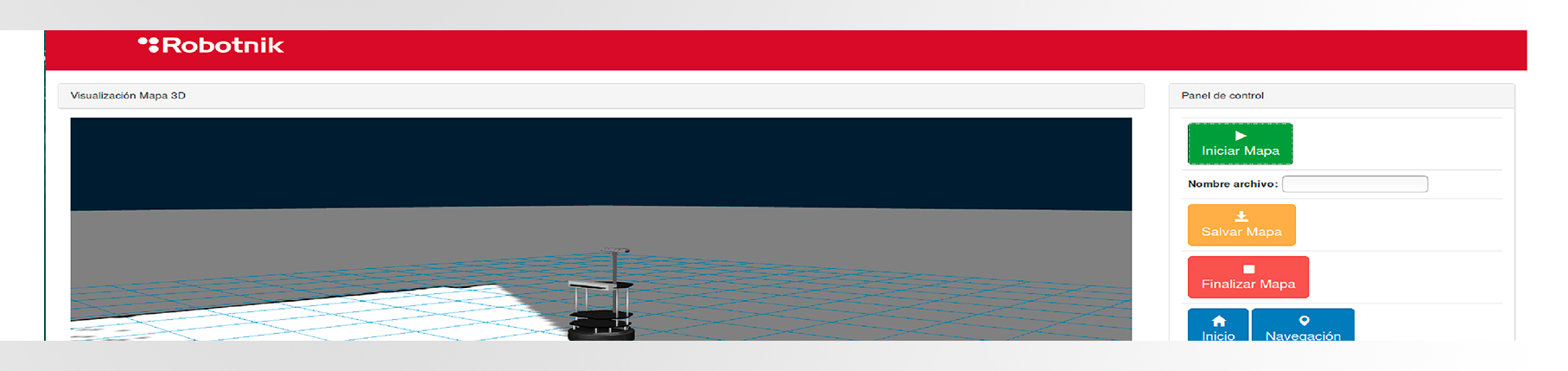
Robotic web applications
ROS is a great tool to develop new robotic applications. Its ease of use and its large amount of tools and wide…

ROS-Industrial, merging ROS and the industry
ROS and open source software have increased in popularity in the last few years, mainly in universities and research…
Augmented Reality going into action
The Augmented Reality (AR) is said to be a live direct or indirect view of a physical, real-world environment whose…

New ROS driver available for the Barrett robotic Hand
Robotnik developed a new ROS package for the Barrett Hand BH8-28X which allows the control of the hand either in…
Ros graphic user interfaces
As robotic systems become more functional, the need to get an overall vision of the operations, control the system and…

5 years of ROS
ROS was 5 years last November and has not stopped growing since its inception. Currently, there are 175 organizations…