


Software en robótica móvil: Avances y aplicaciones
Los avances en el software de robótica móvil están transformando la industria, impulsando innovaciones en materia de…

¿Qué lenguaje de programación usan los robots?
Todo dispositivo electrónico o máquina requiere de un idioma tanto para moverse como para comunicarse con otros…
¿Aprender ROS online? Es posible gracias a la colaboración de Robotnik y The Construct
Al hablar de robótica móvil autónoma, es inevitable hablar de ROS. El framework ROS ha sido uno de los mayores avances…

ROS Control: la clave para consolidar ROS en la industria robótica
El software ROS ha sido uno de los mayores avances de la industria de la robótica en los últimos años. Se trataba de…

Robotnik, patrocinador premium del 3er ROS Developers Day
Robotnik patrocina el 3er ROS Developers Day (* anteriormente llamado "Conferencia de Desarrolladores ROS"), un evento…

¿Te has preguntado cuál es la mejor empresa de robótica especializada en ROS?
Si es así, The Robot Report te da la respuesta, o al menos te acerca a ella, en su artículo Top 10 ROS-based robotics…

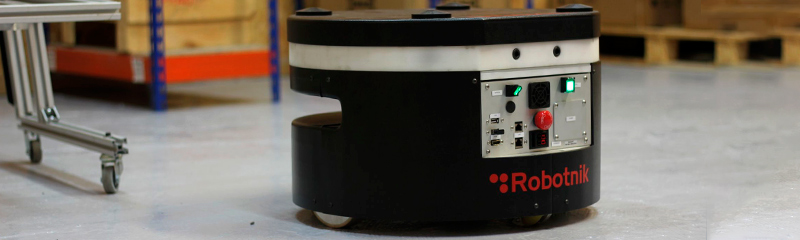
Aprende ROS con el robot móvil SUMMIT-XL de Robotnik
The Construct es ahora mismo una de las empresas de referencia en formación online en software ROS. Cada martes,…

SUMMIT-XL conectado a ROS Development Studio (TheConstructSim)
The Construct acaba de lanza un vídeo donde puede verse el programa de mapeo ejecutándose en el ROSDS, visualizándose…
EL CEO de Robotnik en ROS Developers Podcast
Ricardo Tellez, el fundador de The Constuct, La academia líder online para aprender desarollo con ROS para robots, en…
