


Mobile robotics software: Advancements and applications
Advances in mobile robotics software are revolutionizing the industry, driving innovations in automation and…

What programming language do robots use ?
Every electronic device or machine requires a language both to move and to communicate with other devices, with humans…
Learning ROS online? Is possible thanks to the collaboration of Robotnik and The Construct
If we talk about autonomous mobile robotics, it is essential to talk about ROS. The ROS framework has been one of the…

ROS Control: the key to consolidate ROS in the robotics industry
ROS has been one of the greatest advances of the robotics industry in the past years. Its development began as a way to…

Robotnik, premium sponsor of 3rd ROS Developers Day
Robotnik is going to sponsor the 3rd ROS Developers Day (*formerly named “ROS Developers Conference“), which is a…

Have you ever wondered what’s the best robotics company specializing in ROS?
If so, The Robot Report gives you the answer, or at least it brings you closer to it, in his article Top 10 ROS-based…

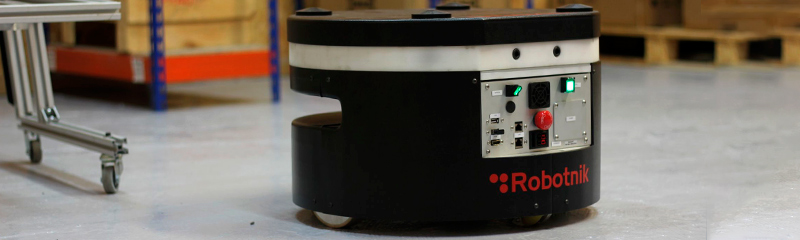
Learn ROS with a SUMMIT-XL from Robotnik
The Construct is the company world leader in teaching ROS online. Every Tuesday it spreads a free ROS Live Class on its…

SUMMIT-XL connected to ROS Development Studio (TheConstructSim)
The Construct has just launched a video with the mapping program is running in the ROSDS, the environment is shown in…
The Robotnik’s CEO at ROS Developers Podcast
Ricardo Tellez, the founder of The Constuct, the leader online academy to learn development with ROS for robots, in his…
