

One of the axioms of the industry is that it is necessary to produce as efficiently as possible in the shortest possible time. It follows that one of the most important factors in most industrial processes is time, which has been increasingly optimized thanks to process automation. Among them, the search for increasingly sophisticated solutions for “pick and place” logistics work stands out. This is where a new product concept based on a broad portfolio has strongly come in: robotic mobile manipulators.
Thus, most of the Companies seeking for a mobile manipulator consider how to select the right one. The following describes the main aspects that a good mobile manipulator must comply with.
OMNIDIRECTIONAL MOTION
“Pick and place” tasks are usually random tasks that require variable and indefinite paths. Therefore, to reduce the duration of this type of tasks it is recommended that the robot optimizes the route: the shortest and with the least number of stops. This is where a robot with omnidirectional movement appears to be the most optimal proposal thanks to its versatility of 360º movement.
Assume the following case study. The following image shows the same route that an omnidirectional mobile manipulator and another differential mobile manipulator must perform to do a “multi” pick and place mission.
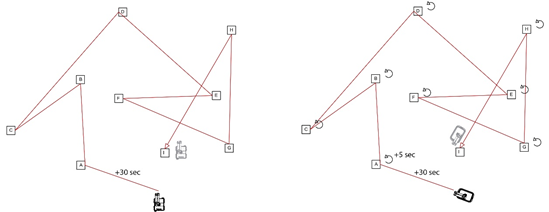
Disregarding the possible obstacles that the robot should overcome, it has been estimated that the manipulator would take about 20 seconds to “pick” at each point (giving a total of about 3 minutes) with the difference that the differential platform should be redirected before starting the point-to-point offset. By estimating the time of each reorientation turn in approximately 5 seconds (40 seconds in total), it is concluded that the differential manipulator does the same task 1/5 times slower than the omnidirectional.
Based on this example and estimating continuous annual use, the robot with differential kinematics would need up to 40 more days to match the production of the omnidirectional robot. With this theoretical data, it can be concluded that a mobile manipulator with omnidirectional kinematics has the guarantees of reducing production times and, therefore, a reduction of costs in the short or medium term.
USABILITY
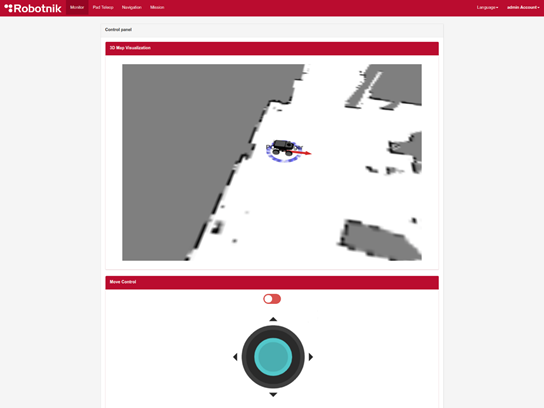
Another necessary factor in the decision to buy a mobile manipulator is the usability it brings to the Customer. First of all, it is important that the start up of the robot and the access to its functions is as predictive as possible, thanks to an integrated software interface to interact with the robot.
A good interface must give option to certain functions that speed up the use and maintenance of the mobile manipulator, among which would be essential:
• Generate missions in a predictive way.
• Check the status of the robot: battery, sensors, motors…
• Robot control.
CONFIGURABILITY
Most Companies value the versatility of the robot when it comes to adapting to its routines. A large part of the robotic mobile platforms on the market have closed software and hardware configurations that do not accept those modifications that the Customer needs. Therefore, it is very important to look for mobile manipulators that allow the implementation of any type of devices or functions that the Client requires for its industrial application. An example would be those Customers who already have robotic arms or camera systems and who need to integrate them into mobile platforms, thus taking advantage of their features without buying new devices.

This type of facilities, again, makes the robot’s adaptation to the industrial environment more agile and bearable. Therefore, it is appropriate to prioritize those mobile manipulators that adapt to the Customer and discard those that only accept predefined closed configurations.
AUTONOMY
It should not be forgotten that the work carried out by a mobile manipulator will complement or replace the workforce of one or more workers over one or more shifts. It is therefore logical to expect that the mobile manipulator selected will be capable of having an autonomy greater than a worker can exercise throughout their working day.
In order not to be constantly aware of the robot’s battery status, it is recommended that the robot has the option of being charged by means of a charging station. This also makes it easier for the robot not to unload and to have more continuous and automated activity.
All the factors that can improve the robot’s autonomy must be taken into account to avoid wasting production time and, therefore, not wasting money.