

Outdoor Mobile Robotics refers to systems that have been specifically designed and developed with the technical specifications, software, and hardware necessary to operate in open-air environments such as agriculture, outdoor logistics, or inspection and surveillance.
Unlike indoor robotics, these robots face changing conditions in uncontrolled environments, irregular terrain, lack of fixed references, and adverse weather elements like rain, dust, or extreme temperatures. Therefore, outdoor autonomous mobile robots must meet more demanding technical requirements in terms of software, hardware, sensing, and integrated components.
Robotnik is one of the pioneering companies in the development and manufacturing of outdoor autonomous mobile robotics. For over 20 years, we have participated in R&D projects in outdoor robotics, allowing us to test our technology, try it under various conditions, detect issues or failures, and improve it to achieve higher levels of autonomy and reliability.
WHAT IS OUTDOOR MOBILE ROBOTICS? KEY TECHNICAL CHARACTERISTICS
Outdoor mobile robotics represents one of the most demanding fields in robotics due to the variability of the environment, the need for extended autonomy, and the ability to navigate unstructured terrain. To ensure safe and efficient operation, certain technical requirements must be considered from the perspectives of hardware, software, and the integrated sensing systems:
Hardware requirements
At the hardware level, the robotic platform must feature a robust chassis capable of withstanding harsh environmental conditions such as rain, dust, and thermal fluctuations, with adequate IP protection.
The traction system is also crucial for terrain adaptability, whether through wheels with independent suspension, tracks, or omnidirectional wheels, depending on the application. The motors used are typically brushless electric motors, paired with controllers that allow for precise torque and speed management, and are coupled with planetary gearboxes to ensure efficiency and strength on slopes or uneven surfaces.
In the context of Autonomous Mobile Robots (AMRs), the processing unit or Central Processing Unit (CPU) acts as the robot’s brain, responsible for processing information and making decisions so the AMR can navigate and perform tasks autonomously, even in unstructured and changing environments. In an outdoor AMR, it is especially important for the CPU to be powerful and efficient to process information quickly and in real time, allowing the robot to react to changes in its surroundings. The CPU receives data from sensors (cameras, lasers, etc.) that detect the robot’s environment and run the software that interprets that data, creates maps, plans routes, and makes decisions.
Another key component for outdoor navigation is the power system, which must offer extended autonomy to perform tasks both remotely controlled and fully autonomously. Battery capacity determines how long the AMR can operate before needing a recharge.

Sensing requirements
Sensing is essential for the robot to perceive its surroundings, localize itself in space, and act effectively. Perception sensors include two-dimensional or three-dimensional LIDARs, which enable high-precision mapping and obstacle detection. These are complemented by RGB or stereo cameras, as well as thermal sensors, used for machine vision and pattern or person recognition.
For navigation and localization, the robot must incorporate GNSS systems with RTK (Real-Time Kinematic) capability, providing centimeter-level positioning accuracy. This system is supported by inertial measurement units (IMUs) that integrate accelerometers, gyroscopes, and in some cases, magnetometers, allowing reliable localization even with temporary satellite signal loss. Wheel encoders provide odometry and are integrated into sensor fusion frameworks.
Safety sensors such as ultrasonic or infrared detectors are also required for detecting nearby objects and preventing collisions. Active and passive safety mechanisms such as emergency stop buttons, temperature sensors, and tilt sensors must be included to ensure system protection in the event of failures or critical conditions.
Software requirements
Software is one of the most critical layers in outdoor mobile robotics, as it enables interpretation of environmental data, autonomous decision-making, route planning, and real-time adaptation to changing conditions. Mobile robots must operate using robust and reliable operating systems, generally based on Linux distributions (such as Ubuntu), combined with robotics-specific middleware like ROS or ROS 2. The latter has become a standard in professional environments due to its distributed architecture, real-time capabilities, fault tolerance, and support for secure node-to-node communication.
Among the most important software modules is SLAM (Simultaneous Localization and Mapping), which allows the robot to build maps of the environment while localizing itself within them, even in spaces without prior infrastructure. Path planning and obstacle avoidance algorithms such as A*, D*, or RRT are also essential for safe and efficient navigation, even in the presence of dynamic obstacles or unstructured terrain.
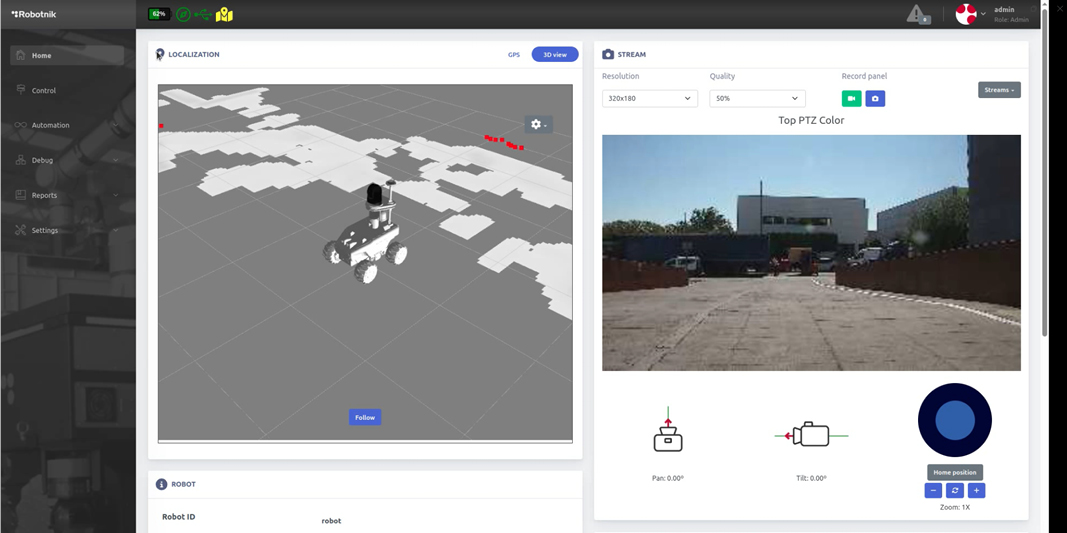
Motion control software relies on PID or predictive controllers to ensure smooth and precise maneuvers, while AI-based computer vision modules enable object, person, or terrain condition detection and classification. Robots also typically include GUI (Graphical User Interface) tools accessible from remote stations or mobile devices for real-time monitoring, configuration, and teleoperation. Finally, telemetry, logging, and diagnostic systems provide traceability and critical data for predictive maintenance or performance analysis.

APPLICATIONS OF MOBILE ROBOTICS IN OUTDOOR ENVIRONMENTS
The applications of outdoor mobile robotics are growing steadily thanks to advances in autonomy, perception, and connectivity. In precision agriculture, for example, robots like the RB-VOGUI are used for crop inspection, selective harvesting, or localized product application, optimizing resources and reducing environmental impact.
In outdoor logistics, AMRs enable automation of material transport between warehouses, industrial sites, or port areas, improving efficiency and reducing risks for workers. In security and surveillance, these robots perform continuous and precise patrols across large areas, perimeter inspections, and real-time alerting, even under adverse weather conditions. They are also used in the exploration of remote or hazardous environments, such as in rescue missions, mining operations, or contaminated areas.
EXAMPLES OF OUTDOOR MOBILE ROBOTS
Robotnik has developed multiple robotic platforms specifically adapted to operate in outdoor environments, standing out for their robustness, autonomy, flexibility, and capacity to integrate with various sensors and manipulators. These Autonomous Mobile Robots (AMRs) are designed to perform demanding tasks in sectors like construction, agriculture, outdoor logistics, or industrial inspection of large infrastructures. Each platform addresses different operational requirements and levels of complexity, allowing modularity according to the final application.
The RB-WATCHER is an autonomous mobile robot specialized in outdoor infrastructure monitoring and surveillance tasks. It incorporates vision sensors and remote communication to perform autonomous security patrols, perimeter control, and incident detection. Its compact design and outdoor navigation capabilities make it ideal for logistics centers, industrial facilities, or energy compounds that require constant inspection.
The RB-FIQUS is a general-purpose platform aimed at applications in agriculture, industry, defense, security, and inspection. Its load capacity of up to 1,000 kg, high stability, and modular architecture make it ideal for transport tasks or agriculture, and an excellent mobile manipulator for heavy loads in outdoor environments. The RB-FIQUS can integrate robotic arms such as UR20 or UR30, among others.

The RB-VOGUI is one of Robotnik’s most versatile AMRs. Designed as an all-terrain modular platform for outdoor R&D tasks and the development of final applications in sectors like agriculture or construction, it can integrate various sensor and actuator configurations to carry out tasks ranging from autonomous inspection to outdoor manipulation. Its modular off-road base, equipped with omnidrive kinematics, ensures efficient movement even on the most uneven terrain.
The RB-SUMMIT autonomous mobile robot is designed for R&D applications both indoors and especially outdoors. Thanks to its versatility, compact size, and high mobility, it is ideal for logistics, transport, or agriculture tasks, supporting up to 50 kg of payload. This robust and modular platform can navigate autonomously or be teleoperated using a PTZ camera with real-time video transmission. The RB-SUMMIT+ version is also available, equipped with the Kinova Gen2 manipulator for advanced handling tasks.
EMERGING USES OF MOBILE ROBOTS IN OUTDOOR ENVIRONMENTS
In addition to established applications, new uses for outdoor mobile robotics are emerging, driven by industrial digitalization, artificial intelligence, and the demand for sustainable solutions. For example, in photovoltaic and wind farms, robots are being used for autonomous panel cleaning or structural turbine inspection. In forestry environments, applications are being explored for biodiversity monitoring, wildfire prevention, or assisted reforestation.
Robots are also being deployed as mobile infrastructure for sensor networks or temporary communications in hard-to-reach areas. With the evolution of 5G and edge computing, mobile robots can function as autonomous nodes within distributed networks, acting in real time and with greater contextual intelligence.
In conclusion, outdoor mobile robotics is a constantly evolving field that combines advanced hardware, software, and sensing technologies to address the challenges of real-world, unstructured environments. Companies like Robotnik continue to lead the development of these solutions, contributing to their application in key sectors such as agriculture, logistics, and security. The future of this technology points toward increasingly autonomous, collaborative, and intelligent systems capable of adapting to complex scenarios and performing critical tasks with greater independence.
FAQs about outdoor robotics
Outdoor mobile robotics refers to autonomous robots designed to operate in outdoor environments like farms, industrial sites, or security zones.
They must handle unpredictable terrain, weather conditions, and the lack of fixed references, requiring more robust hardware and advanced sensing systems.
Agriculture, logistics, security, construction, and environmental monitoring are key sectors using outdoor robots.
Robust chassis, high-capacity batteries, GPS with RTK, LIDAR, AI-based software, and ROS 2 middleware are crucial components.