

The first tests of the integrated robotic system, developed in the framework of the European project ROBO-SPECT, were successfully executed on the week 20-24 July 2015, at the Research Infrastructure Tunnels of VSH (VSH Hagerbach Test Gallery Ltd.), at cast in place concrete, damaged and undamaged section of the tunnel network. The testing was performed by ICCS, UC3M, ROBO, CNR, CASSIDIAN and ENPC project partners, responsible for the creation of the different hardware and software components.
Version 1 of the ROBO-SPECT integrated robotic system tested in VSH tunnels network consists of:
- The robotic platform of the system which is the main system vehicle that incorporates all hardware and software systems and it’s responsible for the autonomous navigation and positioning of the robotic system as well as crane and robotic arm
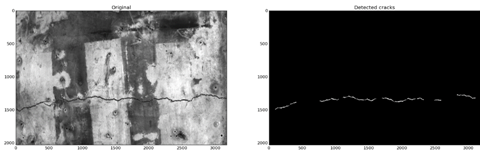
- The computer vision system which is responsible for the crack and other defects detection on the surface of the tunnels, calculation of the crack coordinates as well as the creation of 3D model of the area of interest.
- A 3D laser scanner that is also used to create a 3D representation of the tunnel slice of interest to detect deformations of the tunnel perimeter and shape.
- An ultrasonic sensing device that is used to provide very accurate measurements of the identified cracks with a sub-millimeter precision.
- And a structural assessment software (not evaluated in this lab test) compiling all sensor results and performing the overall tunnel structural assessment and incorporating the tunnel operator interface.

All system components were tested in semi-integrated and individual scenarios into actual parts of the VSH tunnel network and also over damaged testing concrete slabs that were created by the VSH team. The evaluation and benchmarking included the performance of the navigation and positioning system, the vision system, the ability to control the arm, stability, the sensing system, the inspection speed as a function of damage and the structural assessment models.
The testing of the overall robotic platform followed a waterfall approach starting with the robotic platform that included safety lasers installation under operating circumstances, to allow the collision avoidance tool for the movement of the platform. Tests were performed with the movement and positioning of the crane, the general performance of the movement, and the communications and, the interfaces for the mission controller within the robotic system and required adjustments’ have been made were needed.
Following that, tests were focused on the evaluation of the robotic arm operation including its proper communication with the other subsystems: the ROBO-SPECT vision system that was developed by ICCS and the mobile vehicle that was created by ROBOTNIK. The test had shown that the system was able to scan the surface of the wall and position the robotic tip at a constant distance to the wall with normal orientation.
The crack and defect detection computer-vision modules were also tested over visible cracks and were able to perform crack (and other defects’) detections even in areas with multiple cracks on the surface.
The 3D laser scanner of the system was also tested and successfully captured slices of the positions of interest inside the tunnel that were locally stored for further processing.
On-field testing of the ultrasonic sensor system for crack characterisation was performed in VSH facility on cracks artificially produced on a two-meter high sample of tunnel lining with length of several meters, suitable for emulating real working conditions for the ultrasonic sensor system. In these tests, the robot arm was brought close to the lining and brought in contact with it using the four-point supports of the ultrasonic sensor module. The procedure was completed successfully and vibrations during arm movement seemed not to interfere with the precision of the placement and the effectiveness of the crack depth measurements.

ROBO-SPECT follow-up activities include the finalisation of the overall system integration and their subsequent testing. In consistence with the ROBO-SPECT development plan, the system will be validated and benchmarked at the actual tunnels of Egnatia Odos (Greece) and London Underground (UK) in the upcoming March 2016 and July 2016 respectively.
Robotnik has prepared the robotic vehicle so it is able to move on a tele-operated way using a joypad, and semi-autonomously given speed and steering references through the software controller. The obstacle avoidance system is done and the ongoing work deals with the achievement of the needed accuracy for the autonomous navigation. The different joints of the crane can be tele-operated and software controlled. A complete model of the crane has been designed and a software simulator has been created.