

La robótica móvil de exterior es aquella que ha sido diseñada y desarrollada con las especificaciones técnicas, software y hardware necesarios para operar en entornos al aire libre como pueden ser las agrícolas, logística de exterior o inspección y vigilancia.
A diferencia de la robótica de interior, estos robots enfrentan condiciones cambiantes en entornos no controlados, terrenos irregulares, ausencia de referencias fijas y elementos climáticos adversos como lluvia, polvo o temperaturas extremas. Por ello, los robots móviles autónomos de exterior cuentan con unos requerimientos técnicos más exigentes tanto en lo referente al software y hardware, como en cuanto a la sensorización y componentes que integran.
Robotnik es una de las empresas pioneras en el desarrollo y fabricación de robótica móvil autónoma para exteriores. Durante más de 20 años, hemos participado en proyectos de I+D en robótica de exterior que nos ha permitido testear nuestra tecnología, probarla en distintas situaciones, detectar errores o fallas y mejorarla hasta alcanzar unos mejores niveles de autonomía y confiabilidad.
¿QUÉ ES LA ROBÓTICA MÓVIL DE EXTERIOR? PRINCIPALES CARACTERÍSTICAS TÉCNICAS
La robótica móvil de exterior representa uno de los campos más exigentes dentro de la robótica debido a esta variabilidad del entorno, la necesidad de autonomía prolongada y la capacidad de navegación en terrenos no estructurados. Para garantizar su funcionamiento seguro y eficiente, es fundamental considerar ciertos requerimientos técnicos desde el punto de vista del hardware, software y también en cuanto a sensorización que incorpora:
Requerimientos de hardware
A nivel de hardware, la plataforma robótica debe contar con un chasis robusto capaz de resistir las condiciones ambientales adversas del exterior como lluvia, polvo y cambios térmicos con una protección IP adecuada para ello.
El sistema de tracción también es importante para la correcta adaptación al terreno, ya sea a través de ruedas con suspensión independiente, orugas o ruedas omnidireccionales, dependiendo de la aplicación. Los motores utilizados suelen ser eléctricos brushless, acompañados de controladores que permitan una gestión precisa del par y la velocidad, y se acoplan a reductores planetarios para garantizar eficiencia y fuerza en pendientes o superficies irregulares.
En el contexto de los Robots Móviles Autónomos, la unidad de procesamiento o Unidad Central de Procesamiento (CPU), es la que actúa como el cerebro del robot, encargándose de procesar la información y tomar decisiones para que el AMR pueda navegar y realizar sus tareas de manera autónoma, a pesar del entorno desestructurado y cambiante. En un AMR de exterior, es especialmente importante que la CPU sea potente y eficiente para procesar información rápidamente y en tiempo real, de manera que el robot pueda reaccionar a cambios en su entorno. La CPU recibe datos de los sensores (cámaras, láseres, etc.) que detectan el entorno del robot y ejecutan el software que le permite interpretar esos datos, crear mapas, planificar rutas y tomar decisiones.
Otro componente relevante para la navegación en entornos de exterior es el sistema de alimentación, que debe ofrecer una autonomía prolongada para ejecutar tareas tanto controladas en remoto como totalmente autónomas. La capacidad de la batería determina la duración de la operación del AMR antes de requerir una recarga.

Requerimientos de sensorización
La sensorización es fundamental para que el robot perciba el entorno, se localice en el espacio y actúe con eficacia. Los sensores de percepción incluyen LIDARs bidimensionales o tridimensionales, que permiten generar mapas del entorno y detectar obstáculos con alta precisión. Se complementan con cámaras RGB o estéreo, así como sensores térmicos, utilizados para visión artificial y reconocimiento de patrones o personas.
Para la navegación y localización, el robot debe incorporar sistemas GNSS con capacidad RTK (Real-Time Kinematic) que proporcionen posicionamiento centimétrico. Este sistema se complementa con unidades inerciales (IMU) que integran acelerómetros, giróscopos y, en algunos casos, magnetómetros, permitiendo una localización confiable incluso con pérdida temporal de señal satelital. Los encoders instalados en las ruedas sirven para realizar odometría y se integran en esquemas de fusión de sensores.
Además, se requieren sensores de seguridad como ultrasonidos o infrarrojos, útiles para la detección de objetos cercanos y prevención de colisiones. Se deben incluir mecanismos de seguridad activa y pasiva como botones de parada de emergencia, sensores de temperatura y sensores de vuelco, que garanticen la protección del sistema ante fallas o condiciones críticas.
Requerimientos de software
El software es una de las capas más críticas en la robótica móvil de exterior, ya que permite interpretar los datos del entorno, tomar decisiones autónomas, planificar rutas y adaptarse a condiciones cambiantes en tiempo real. Para ello, los robots móviles deben operar con sistemas operativos robustos y fiables, generalmente basados en distribuciones Linux (como Ubuntu) en combinación con middlewares especializados en robótica como ROS o ROS 2. Este último se ha consolidado como estándar en entornos profesionales debido a su arquitectura distribuida, capacidades en tiempo real, tolerancia a fallos y soporte para comunicaciones seguras entre nodos.
Entre los módulos de software más importantes se encuentra el SLAM (Simultaneous Localization and Mapping), que permite al robot construir mapas del entorno al mismo tiempo que se localiza dentro de ellos, incluso en espacios sin infraestructura previa. También son fundamentales los algoritmos de planificación de trayectorias y evasión de obstáculos, como A*, D* o RRT, que garantizan una navegación segura y eficiente, incluso en presencia de obstáculos dinámicos o terrenos no estructurados.
El software de control de movimiento se apoya en controladores PID o control predictivo que permiten realizar maniobras suaves y precisas, mientras que los módulos de visión artificial basados en inteligencia artificial permiten la detección y clasificación de objetos, personas o condiciones del terreno. Además, los robots suelen incluir interfaces gráficas de usuario (GUI) accesibles desde estaciones remotas o dispositivos móviles para la supervisión, configuración y teleoperación en tiempo real. Por último, los sistemas de telemetría, logging y diagnóstico proporcionan trazabilidad y datos críticos para mantenimiento predictivo o análisis de rendimiento.

APLICACIONES DE LA ROBÓTICA MÓVIL EN ENTORNOS DE EXTERIOR
Las aplicaciones de la robótica móvil de exterior aumentan cada vez más gracias a los avances en autonomía, percepción y conectividad. En agricultura de precisión, por ejemplo, robots como el RB-VOGUI se utilizan para la inspección de cultivos, recolección selectiva o aplicación localizada de productos, optimizando los recursos y reduciendo el impacto ambiental.
En logística de exteriores, los AMR permiten automatizar el transporte de materiales entre almacenes, naves industriales o áreas portuarias, mejorando la eficiencia y reduciendo riesgos para los operarios. En el ámbito de la seguridad y vigilancia, estos robots realizan patrullas continuas y precisas en grandes superficies, inspecciones perimetrales y envían alertas en tiempo real, incluso en condiciones climáticas adversas. También se utilizan en exploración de entornos remotos o peligrosos, como en misiones de rescate, minería o entornos contaminados.
EJEMPLOS DE ROBOTS MÓVILES DE EXTERIOR
Robotnik ha desarrollado múltiples plataformas robóticas específicamente adaptadas para operar en entornos exteriores, destacando por su robustez, autonomía, flexibilidad y capacidad de integración con distintos sensores y manipuladores. Estos Robots Móviles Autónomos (AMR) están diseñados para ejecutar tareas exigentes en sectores como la construcción, agricultura, logística en exteriores o inspección industrial en grandes infraestructuras. Cada plataforma responde a distintos requisitos operativos y niveles de complejidad, permitiendo la modularidad según la aplicación final.
El RB-WATCHER es un robot móvil autónomo especializado en tareas de vigilancia y monitorización de infraestructuras al aire libre. Incorpora sensores de visión y comunicación remota para realizar rondas autónomas de seguridad, control perimetral y detección de incidencias. Su diseño compacto y su capacidad de navegación en exteriores lo hacen ideal para centros logísticos, instalaciones industriales o recintos energéticos que requieran inspección constante.
El RB-FIQUS es una plataforma de propósito general orientada a aplicaciones en agricultura, industria, defensa, seguridad e inspección. Su capacidad de carga de hasta 1.000 kg en la base, su estabilidad y su arquitectura altamente modular, lo convierten en una plataforma ideal para tareas de transporte o agricultura y en un magnífico manipulador móvil para cargas pesadas en entornos exteriores. El RB-FIQUS puede integrar brazos robóticos UR20 o UR30, entre otros.

El RB-VOGUI es uno de los AMR más versátiles de Robotnik. Diseñado como una plataforma modular todo terreno para tareas de I+D en exteriores y el desarrollo de aplicaciones finales en sectores como la agricultura o la construcción, puede integrar diferentes configuraciones de sensorización y actuadores para realizar desde inspecciones autónomas hasta tareas de manipulación en exteriores. Su base todoterreno modular, equipada con cinemática omnidrive, garantiza un desplazamiento eficiente incluso en los terrenos más irregulares.
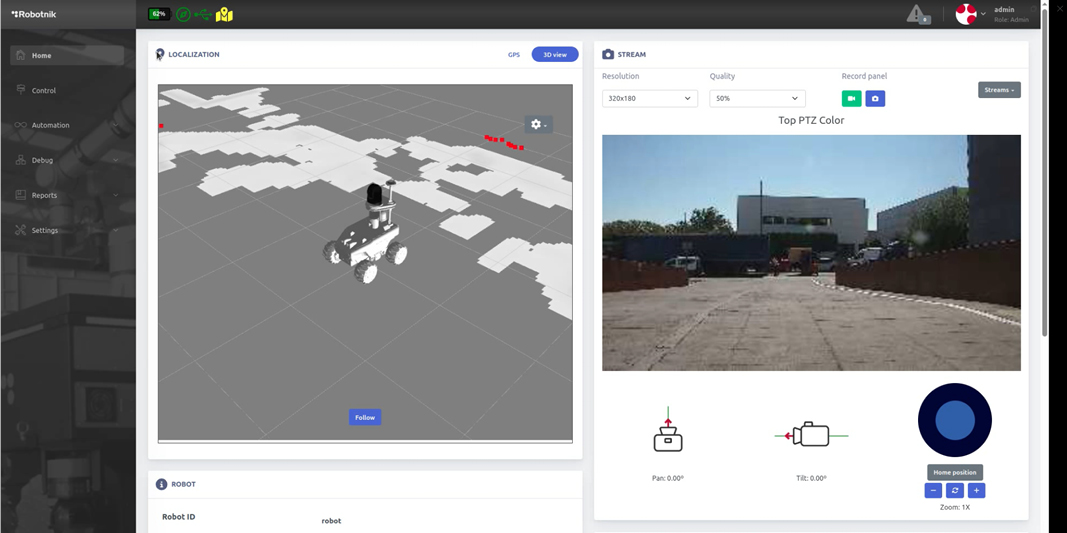
El robot móvil autónomo RB-SUMMIT está diseñado para aplicaciones de I+D tanto en interiores como, especialmente, en exteriores. Gracias a su versatilidad, tamaño compacto y gran movilidad, es ideal para tareas de logística, transporte o agricultura, soportando hasta 50 kg de carga. Esta plataforma robusta y modular puede navegar de forma autónoma o ser teleoperada mediante una cámara PTZ con transmisión de vídeo en tiempo real. Además, está disponible la versión con brazo robótico, RB-SUMMIT+, equipada con el manipulador Kinova Gen2 para tareas avanzadas de manipulación.
USOS EMERGENTES DE ROBOTS MÓVILES EN ENTORNOS EXTERIORES
Además de las aplicaciones ya consolidadas, están surgiendo nuevos usos de la robótica móvil de exterior impulsados por la digitalización industrial, la inteligencia artificial y la demanda de soluciones sostenibles. Por ejemplo, en parques fotovoltaicos y eólicos, los robots se están utilizando para inspección y limpieza autónoma de paneles solares o revisión estructural de turbinas. En entornos forestales, se exploran aplicaciones para la monitorización de biodiversidad, prevención de incendios o reforestación asistida.
También se está avanzando en el despliegue de robots como infraestructura móvil para redes de sensores o comunicaciones temporales en zonas de difícil acceso. Con la evolución del 5G y la computación en el borde (edge computing), los robots móviles pueden funcionar como nodos autónomos dentro de redes distribuidas, actuando en tiempo real y con mayor inteligencia contextual.
En conclusión, la robótica móvil de exterior es un área en constante evolución que combina tecnologías avanzadas de hardware, software y sensorización para enfrentar los retos que suponen los entornos reales no estructurados. Empresas como Robotnik continúan liderando el desarrollo de estas soluciones, contribuyendo a su aplicación en sectores clave como la agricultura, la logística o la seguridad. El futuro de esta tecnología apunta hacia sistemas cada vez más autónomos, colaborativos e inteligentes, capaces de adaptarse a escenarios complejos y cumplir tareas críticas con mayor autonomía.
Preguntas frecuentes sobre la robots para exteriores
La robótica móvil de exterior se refiere a robots autónomos diseñados para operar en entornos al aire libre como áreas agrícolas, zonas industriales o áreas de seguridad.
Deben enfrentarse a terrenos impredecibles, condiciones climáticas variables y ausencia de referencias fijas, por lo que requieren hardware más robusto y sistemas de sensorización avanzados.
Chasis robustos, baterías de alta capacidad, GPS con RTK, LIDAR, software basado en IA y middleware ROS 2 son componentes fundamentales.
Agricultura, logística, seguridad, construcción y monitoreo ambiental son sectores clave que utilizan robots de exterior.