ASÍ INTEGRA LA IA UN ROBOT DE INSPECCIÓN Y SEGURIDAD
El robot móvil autónomo de inspección y seguridad desarrollado por Robotnik, RB-WATCHER, se consolida en 2025 como un referente tecnológico gracias a la integración de Inteligencia Artificial (IA) y visión computacional, que le proporcionan capacidades avanzadas de percepción, detección y toma de decisiones en tiempo real.
Gracias al trabajo de mejora constante del equipo de software de Robotnik, tras un tiempo de pruebas y desarrollos, mostramos en este artículo cómo mejoran las operaciones de inspección y seguridad del RB-WATCHER al combinar algoritmos de aprendizaje profundo, sensores multiespectrales y un sistema de gestión de misiones autónomas.
Arquitectura de reconocimiento por visión
El sistema de visión del RB-WATCHER está compuesto por un conjunto de cámaras de alta resolución y sensores complementarios, entre ellos cámaras RGB, térmicas y 3D, que capturan información visual de su entorno. A través de sus módulos de procesamiento de IA, el robot interpreta las imágenes para detectar objetos, personas o incidencias relevantes.
El entrenamiento de estos modelos requiere grandes volúmenes de datos representativos del entorno industrial. Por ejemplo, para entrenar un módulo de detección de personas, se utilizan decenas de miles de imágenes que enseñan a la IA a diferenciar entre siluetas humanas, objetos móviles o elementos del entorno.
Gracias a esta metodología, el RB-WATCHER consigue una tasa de precisión elevada, incluso en condiciones de iluminación adversas o entornos con movimiento y ruido visual.
Integración de IA con la operación autónoma del robot
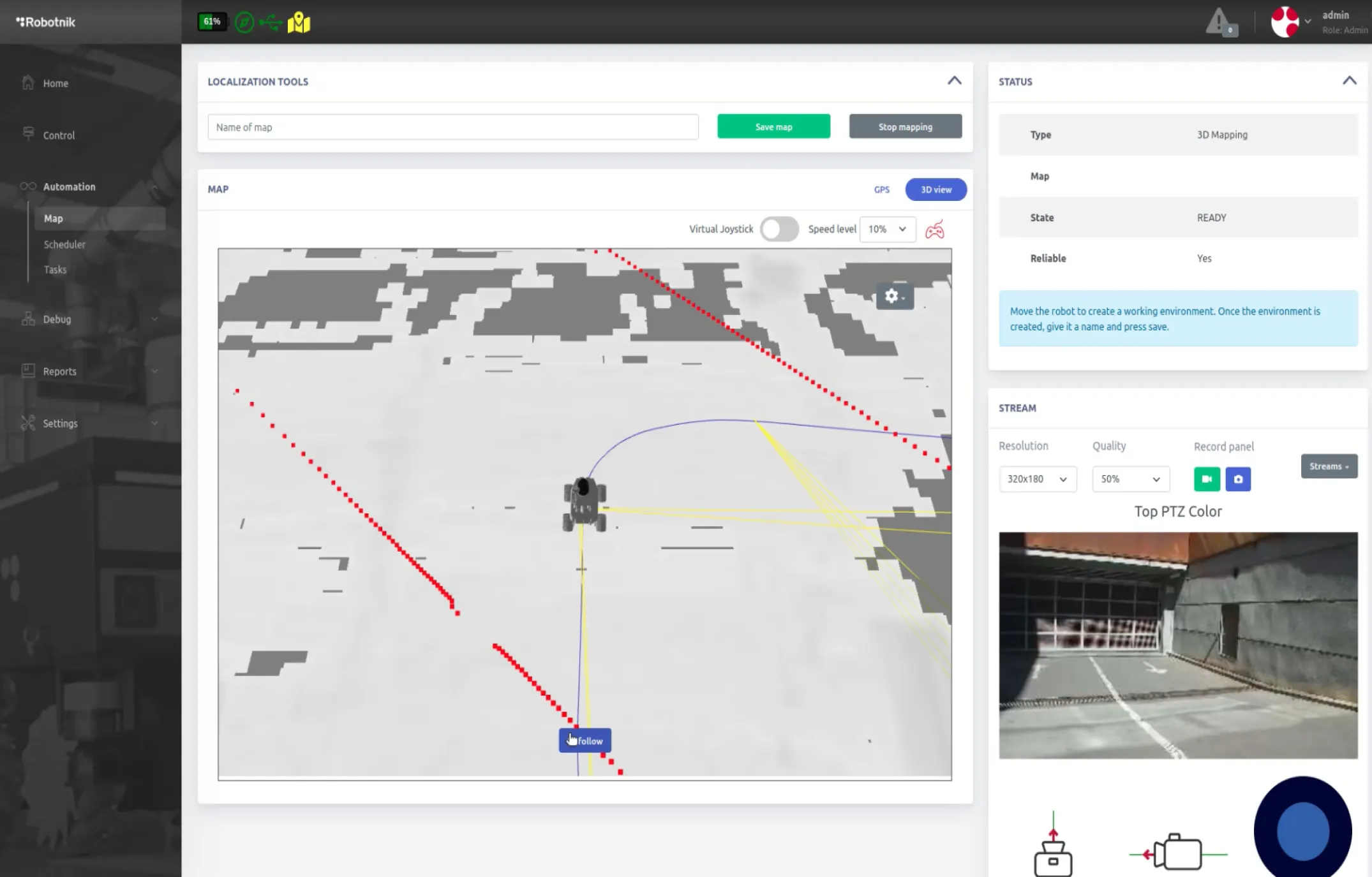
Uno de los avances más importantes del RB-WATCHER es la integración total entre los sistemas de visión basados en IA y su software de gestión autónoma, conocido como Robot Management System (RMS).
El RMS es el cerebro operativo del robot: un sistema que gestiona la planificación, ejecución y priorización de misiones, tomando decisiones automáticas en función de parámetros como el nivel de batería, el estado de los sensores o la carga de trabajo.
Funciones principales del RMS
-
- Gestión de eventos: supervisa la ejecución de misiones (inicio, finalización, errores o cancelaciones).
- Control de tiempo en estado IDLE: si el robot permanece inactivo demasiado tiempo por un obstáculo o error, el sistema ordena el retorno automático a la estación de carga.
- Gestión energética inteligente: regula los niveles de batería, estableciendo umbrales para iniciar, pausar o rechazar misiones según el nivel de energía disponible.
- Seguridad energética avanzada: incluye apagado automático ante niveles críticos o protocolos de hibernación en caso de fallo de retorno al docking.
Interacción entre IA y RMS
Cuando los módulos de visión detectan una anomalía, el RMS evalúa la prioridad del evento y decide cómo actuar: registrar la información, generar una alerta, cambiar la ruta del robot o incluso interrumpir una misión en curso.
Esta capacidad de razonamiento operativo y autonomía de decisión aporta al RB-WATCHER ventajas para una inspección industrial más fiable e inteligente.

Capacidades avanzadas de inspección industrial
La Inteligencia Artificial potencia las capacidades de reconocimiento y análisis visual del RB-WATCHER, permitiéndole adaptarse a los exigentes requisitos de la inspección industrial, la seguridad perimetral y la vigilancia autónoma.
El robot integra múltiples módulos de visión artificial, específicamente diseñados para distintas aplicaciones de inspección y supervisión en entornos industriales:
-
- Detección de personas: RB-WATCHER identifica la presencia de personas en áreas determinadas, generando alertas automáticas en caso de detección no autorizada o presencia en zonas restringidas. Además, incorpora filtros de privacidad en tiempo real, que respetan el anonimato de rostros y datos sensibles cumpliendo con las normativas de protección de datos (GDPR).
- Detección de anomalías térmicas: Equipado con cámaras termográficas, el RB-WATCHER es capaz de detectar fuentes de calor inusuales o sobrecalentamientos en equipos eléctricos, motores o instalaciones industriales. Posteriormente compara la señal térmica con valores normales del entorno, identificando posibles riesgos de incendio, cortocircuitos o fugas de calor antes de que se conviertan en incidentes críticos.
- Supervisión de infraestructura: La visión por IA también permite al robot detectar vehículos o leer matrículas dentro del perímetro de inspección, registrando eventos en bases de datos y generando alertas automáticas. Estas capacidades convierten al RB-WATCHER en una herramienta estratégica para la automatización de tareas de supervisión y mantenimiento preventivo, reduciendo la necesidad de presencia física de un operario.
Extensibilidad y entrenamiento de nuevos módulos de visión
Una de las ventajas diferenciales del RB-WATCHER es su arquitectura abierta y escalable, que permite desarrollar y entrenar nuevos módulos de reconocimiento adaptados a las necesidades específicas de cada cliente o proyecto.
Algunos ejemplos de su extensibilidad mediante nuevos modelos de detección incluyen:
-
- Identificación de indicadores industriales como goteos en tuberías, fugas de gas o pérdida de temperatura.
- Verificación del uso de Equipos de Protección Individual (EPI), como cascos, guantes o botas de seguridad.
- Reconocimiento de componentes críticos en maquinaria o instalaciones industriales.
- Análisis de condiciones ambientales, como la detección de humo, gases o humedad excesiva.
Ciclo de desarrollo de un nuevo módulo de IA
-
- Recopilación de datos: se capturan imágenes y vídeos representativos del entorno real.
- Etiquetado de datos: expertos clasifican las imágenes, marcando los elementos relevantes.
- Entrenamiento del modelo: se entrena la red neuronal con técnicas de aprendizaje profundo.
- Validación: se testea el modelo en condiciones reales para evaluar su precisión.
- Ajuste y mejora continua: los modelos se optimizan de forma iterativa con nuevos datos.
Este proceso garantiza que cada módulo de visión del RB-WATCHER sea robusto, preciso y adaptable a diferentes entornos operativos.
Aplicaciones reales en entornos industriales y de seguridad
La combinación de IA, visión artificial y gestión autónoma posiciona al RB-WATCHER como una herramienta fundamental para la industria 4.0 y la seguridad avanzada. Algunos ejemplos de aplicación práctica incluyen:
-
- Detección de sobrecalentamientos en cuadros eléctricos o motores.
- Identificación de presencia humana no autorizada en zonas restringidas.
- Control de fugas o goteos en sistemas hidráulicos.
- Supervisión de vallados, puertas o cerramientos dañados.
- Verificación del uso de EPI por parte de operarios en áreas de riesgo.
- Monitorización de vehículos o elementos mal posicionados dentro del perímetro de trabajo.
Ventajas de la IA en la robótica de inspección
El uso de la inteligencia artificial en la robótica está revolucionando las operaciones de inspección industrial y seguridad. Al combinar capacidades avanzadas de percepción y toma de decisiones, la IA permite a los robots operar con mayor eficiencia y autonomía, lo que ofrece ventajas clave como:
-
- Autonomía mejorada: RB-WATCHER puede operar sin supervisión humana directa.
- Prevención de riesgos: la detección temprana evita incidentes y reduce tiempos de inactividad.
- Optimización de recursos: automatiza tareas repetitivas y libera al personal humano para labores de mayor valor añadido.
- Evolución continua: los modelos de IA mejoran con el tiempo gracias al aprendizaje continuo y la actualización de datos.
- Interoperabilidad: el RB-WATCHER se integra fácilmente con otros sistemas de gestión, plataformas IoT o soluciones de seguridad empresarial.

IA al servicio de la inspección autónoma
El desarrollo del RB-WATCHER refleja la evolución natural de la robótica de inspección hacia sistemas capaces de percibir, interpretar y actuar de forma autónoma en entornos complejos. Su arquitectura abierta y escalable permite entrenar y adaptar nuevos modelos de inteligencia artificial para distintos escenarios, superando las limitaciones tradicionales de la inspección manual, como la subjetividad, la fatiga o el acceso restringido a determinadas áreas.
La combinación de sensores multiespectrales, mapeado tridimensional y algoritmos de aprendizaje profundo sitúa a este tipo de robots en la frontera entre la observación automática y el análisis inteligente. Más que sustituir al operario humano, la IA amplía su alcance, asumiendo las tareas de detección y diagnóstico inicial, mientras que los expertos interpretan los resultados y validan las decisiones críticas.
Este enfoque híbrido marca un cambio de paradigma: la inspección deja de ser una actividad puntual y reactiva para transformarse en un proceso continuo, sustentado en datos objetivos y en una observación constante del entorno. Los registros que genera el sistema no solo documentan el estado de las infraestructuras, sino que alimentan modelos predictivos capaces de anticipar fallos y optimizar el mantenimiento.
En conjunto, el RB-WATCHER representa un paso hacia un modelo de supervisión industrial más autónomo, preciso y sostenible, donde las infraestructuras pueden ser monitorizadas de forma permanente mediante plataformas inteligentes que aprenden y evolucionan con el entorno.
Este tipo de soluciones apunta a un futuro en el que la inspección se integrará de manera natural en el ciclo de vida de las instalaciones, sin interrupciones y con una fiabilidad difícil de alcanzar mediante métodos convencionales.
Preguntas frecuentes sobre sobre IA aplicada a la róbotica de inspección
La IA del RB-WATCHER se aplica principalmente en el procesamiento de imágenes captadas por cámaras RGB, térmicas y 3D. Gracias a algoritmos de aprendizaje profundo, el robot puede reconocer objetos, personas y anomalías, tomar decisiones automáticas y mejorar continuamente su precisión mediante el entrenamiento con grandes volúmenes de datos reales.
Los principales beneficios de la IA en robótica de inspección son el incremento de autonomía operativa, la optimización de recursos y reducción de tareas repetitivas, la evolución continua gracias al aprendizaje automático y una mayor interoperabilidad con otros sistemas y plataformas.
El RB-WATCHER se utiliza para detectar sobrecalentamientos en equipos eléctricos, identificar presencia no autorizada, controlar fugas o goteos, supervisar vallados o estructuras dañadas y verificar el uso de equipos de protección en áreas de riesgo.