

En el ámbito de la robótica, la interfaz hombre-máquina (Human-Machine Interface, por sus siglas en inglés) es la interfaz de control que facilita la comunicación entre el usuario y el sistema robótico mediante un dispositivo como una tablet, pc o un smartphone. A través del HMI, los operadores pueden supervisar el estado del robot, configurar parámetros, ejecutar tareas o analizar datos en tiempo real, lo que mejora significativamente la operatividad, seguridad y usabilidad de los sistemas robóticos. El HMI adquiere una importancia aún mayor en entornos industriales, logísticos, de inspección o vigilancia, donde la interacción intuitiva y el control preciso son fundamentales para una automatización efectiva.
Con el objetivo de seguir facilitando la interacción de los usuarios, Robotnik ha desarrollado una nueva Human-Machine Interface para el robot de vigilancia RB-WATCHER.
La herramienta ha sido diseñada para mejorar la comunicación entre el operador y el robot, simplificando tareas complejas como la configuración de rutas, la gestión de misiones, la teleoperación remota o la recepción de alertas y notificaciones a través de email o Telegram ante sucesos anómalos en el entorno.
Este artículo explica las ventajas que aporta la interfaz para una vigilancia más inteligente y autónoma.
HUMAN MACHINE INTERFACE EN ROBÓTICA
En términos generales, un HMI es un desarrollo de software y hardware que permite al usuario comunicarse e interactuar con una máquina, sin tener que modificar el código de la misma. Existen muchos ejemplos de HMI en el ámbito cotidiano que van desde las Apps móviles para controlar un robot de limpieza doméstico hasta los asistentes virtuales con interfaz de voz para gestionar la domótica.
Más allá de estos usos comerciales, el Human-Machine Interface en robótica, permite a usuarios de distintos niveles supervisar el estado del robot, controlar sus movimientos, definir comportamientos, analizar datos operativos o gestionar tareas automatizadas.
Dependiendo del tipo de aplicación (industrial, logística, médica, vigilancia, etc.), el HMI puede incluir desde simples visualizadores hasta plataformas complejas con dashboards interactivos, mapas en tiempo real y programación de misiones.
En el caso del RB-WATCHER, el HMI es la interfaz de usuario que optimiza el control, monitorización y programación del robot, haciendo posible una operación más intuitiva.
El usuario puede acceder al HMI a través de cualquier navegador web, conectándose a la misma red que el robot, y seguir los pasos que indicamos en el Control Interface Manual para iniciar sesión y ejecutar las configuraciones iniciales. A partir de este momento, ya tendrá acceso a los distintos paneles, páginas de navegación y funcionalidades disponibles.
Robotnik ha mejorado la interfaz de usuario para que, tanto operadores básicos como desarrolladores expertos, puedan gestionar tareas complejas, desde la definición de zonas de patrulla hasta el análisis de datos en tiempo real.
FUNCIONALIDADES PRINCIPALES DEL HMI DEL RB-WATCHER
El desarrollo de la nueva interfaz hombre-máquina (HMI) para el robot RB-WATCHER tiene como objetivo que las funcionalidades estén totalmente centradas en el usuario, aportando la máxima sencillez. El resultado es una gestión del robot más ágil y mejor control operativo, facilitando más que nunca el trabajo con sistemas autónomos en entornos reales.
1. Creación de mapas y definición de áreas de interés
Una de las características más importantes del HMI del RB-WATCHER es la creación de mapas personalizados y la definición precisa de áreas y puntos de interés mediante coordenadas específicas. Esta funcionalidad es fundamental para la navegación autónoma del robot en entornos tanto interiores como exteriores.
Así, el robot puede desplazarse de forma eficiente a ubicaciones predefinidas, optimizando las rutas de patrulla y garantizando la cobertura completa de zonas estratégicas, una necesidad esencial en misiones de seguridad y vigilancia inteligente.
2. Programación automática de tareas y planificación de patrullas
El HMI incluye un avanzado planificador de tareas (task scheduling) que permite programar rutas, inspecciones periódicas y acciones específicas en función de horarios o días predefinidos.
Esta función facilita la operación autónoma del RB-WATCHER, reduciendo la necesidad de supervisión manual. Además, el sistema permite modificar la planificación para adaptarse a cambios en las condiciones o requerimientos operativos.
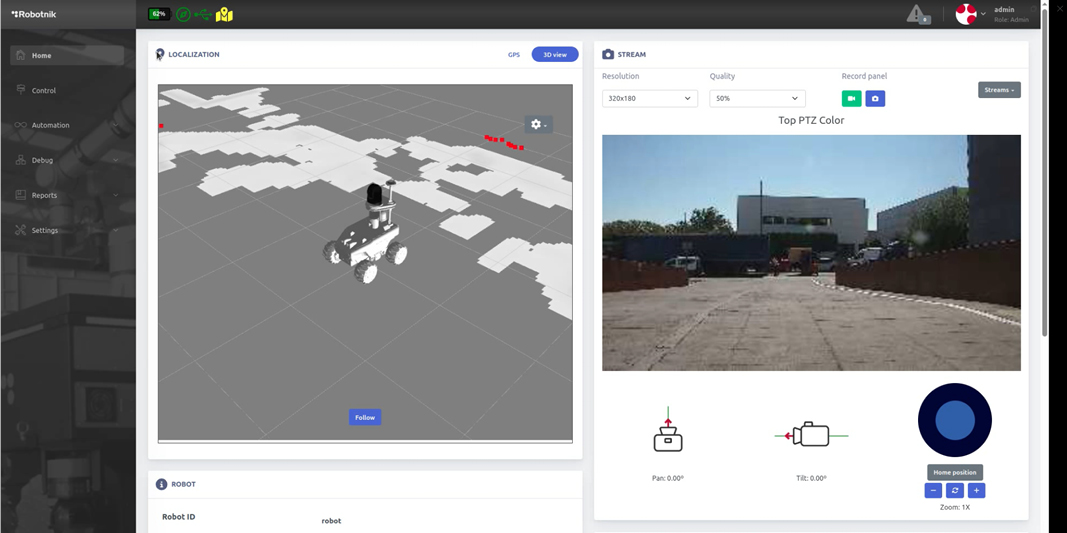
3. Monitorización en tiempo real y análisis de datos
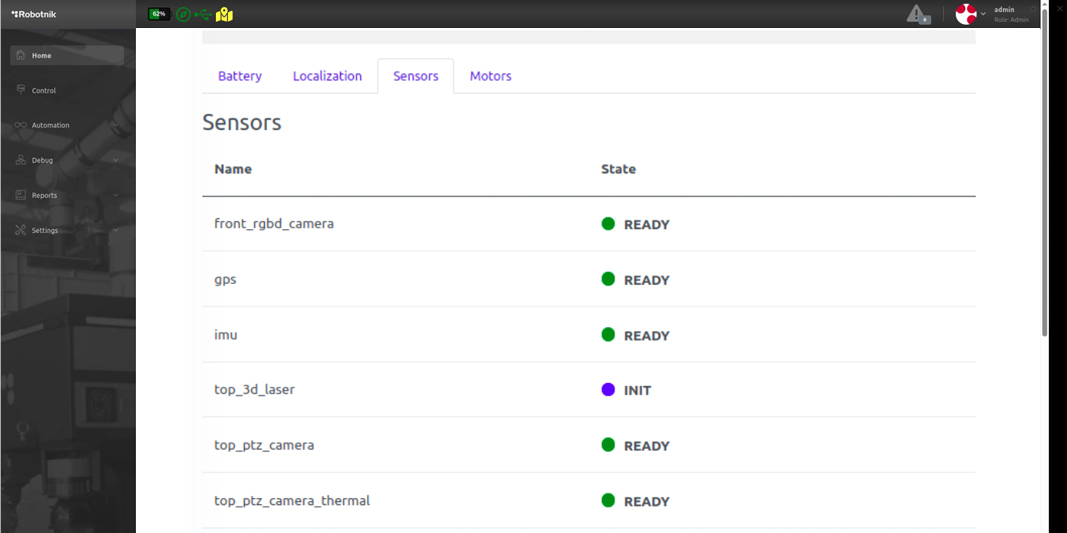
El sistema de monitorización en tiempo real integrado en el HMI ofrece una visión completa del estado y rendimiento del robot. Mediante gráficos, métricas y registros históricos, los operadores pueden analizar el comportamiento del robot, detectar posibles incidencias y optimizar futuras misiones.
Además, el HMI proporciona supervisión de variables críticas como nivel de batería, velocidad y estado de los sensores, aportando información vital para garantizar la seguridad y efectividad de las operaciones.
4. Teleoperación remota con acceso a cámaras
Una función destacada del HMI del RB-WATCHER es la capacidad de teleoperación remota en tiempo real. Esto permite operar de forma manual del robot desde cualquier ubicación como un centro de control.
La teleoperación se realiza de forma segura desde una estación remota, con supervisión visual directa a través de las cámaras integradas en el robot, facilitando la toma de decisiones rápidas y precisas en misiones críticas como un entorno desconocido, inspecciones detalladas o situaciones imprevistas.
5. Gestión de perfiles de usuario y control de acceso
Para garantizar un uso seguro y eficiente, el HMI cuenta con un sistema de gestión de perfiles y control de acceso que se adapta a los diferentes roles dentro de una organización. De esta manera, se puede configurar qué clase de acceso tiene cada operario y a qué funcionalidades puede gestionar según su nivel de responsabilidad:
- Solo lectura (monitorización): acceso para consultar información sin permisos para modificar.
- Overview, control y teleoperación: permite supervisar y manejar el robot manualmente cuando sea necesario.
- Permiso de edición: habilita la configuración de mapas, tareas y parámetros.
- Desarrollador (DEBUG): acceso a funciones avanzadas para desarrollo y ajustes específicos.
- Superadministrador: control total, incluida la automatización completa, gestión de misiones y configuración del sistema.
BENEFICIOS DEL HMI PARA LA SEGURIDAD Y LA INSPECCIÓN AUTÓNOMA
La implementación del HMI en el RB-WATCHER aporta múltiples beneficios para empresas y organismos que requieren vigilancia continua y automatizada:
- Mayor eficiencia operativa: automatización y programación inteligente reducen la intervención manual y mejoran la cobertura.
- Mejor toma de decisiones: el análisis de datos en tiempo real permite anticipar problemas y optimizar misiones.
- Flexibilidad y adaptabilidad: la personalización de mapas, rutas y tareas facilita la adaptación a distintos entornos y requisitos.
- Seguridad reforzada: control de acceso y teleoperación remota garantizan un uso responsable y seguro del robot.
- Escalabilidad: el sistema se adapta a distintos niveles de usuario, desde operadores básicos hasta técnicos avanzados.
EL FUTURO DEL HMI EN ROBÓTICA
La evolución del Human Machine Interface en robótica está ligada al desarrollo de tecnologías convergentes como la inteligencia artificial, el edge computing, la realidad aumentada y las interfaces multimodales. El futuro inmediato apunta hacia sistemas capaces de interpretar el contexto operativo, adaptarse dinámicamente al perfil del usuario y ofrecer capacidades de supervisión y control más predictivas que reactivas. La integración de modelos de IA en el HMI permitirá no solo optimizar la toma de decisiones del operador, sino también automatizar procesos complejos mediante interfaces simplificadas. Asimismo, la conectividad 5G y la computación en la nube habilitarán HMIs más distribuidos y accesibles desde cualquier punto, incluso en tiempo real. Estos avances consolidan al HMI no solo como conector entre humano y máquina, sino como una capa crítica de abstracción y coordinación entre sistemas heterogéneos, que será esencial para escalar la robótica autónoma en entornos industriales, logísticos, urbanos o de seguridad.
El nuevo HMI del RB-WATCHER representa un salto cualitativo en la interfaz hombre-máquina para robots de vigilancia autónoma. Su combinación de funcionalidades avanzadas y usabilidad facilita la gestión operativa, mejora la seguridad y potencia la autonomía del robot.
Si quieres conocer más sobre esta innovadora interfaz y cómo puede transformar tu operación, no dudes en contactar con el equipo de Robotnik.

Preguntas frecuentes sobre la róbotica en la industria aeroespacial
Los robots móviles realizan tareas de alta precisión como inspecciones dimensionales, tratamientos de superficie y ensamblaje de componentes, garantizando calidad y seguridad.
Mejoran la repetibilidad, ahorran tiempo, no requieren de modificaciones en la planta y aumentan la seguridad gracias a la colaboración humano-robot.
Utilizan sistemas de escaneo 2D/3D para moverse de forma autónoma sin marcas en el suelo ni guías físicas.
