

ROS is a great tool to develop new robotic applications. Its ease of use and its large amount of tools and wide community makes ROS a great way to start learning robotics, or to develop a state of the art industrial applications. In spite of all these advantages, one of ROS main limitations is that it must work on Linux systems, mainly Ubuntu. Linux and Ubuntu are increasing the number of desktop users, but nowadays the most used Operating Systems are Windows for desktop users, and Android for mobile. This makes hard to integrate applications when the end user has never used a Linux Ubuntu system, or its infrastructure is based on Windows or Android. This problem can be solved by developing robotic applications taking advantage of the ROS web framework. ROS web framework is a collection of open-source tools and modules, built around the Robot Web Tools project, with the goal of converge ROS with modern web and network technologies. This will create a broadly accessible environment for robot development and human-interaction research used over wide area networks.
Robot Web Tools uses WebSockets to communicate with ROS middleware, and offers several tools to help develop applications using rosbridge. The main front-end tools is the roslibjs package, that is a library to build ROS nodes using Javascript, and allows usage of ROS topics, services, goals, parameters and TF. ros2djs and ros3djs are used to create 2D and 3D visualization of the ROS environment, allowing to visualize maps, costmaps, grids, URDF models, InteractiveMarkers, PointClouds and other basic geometric shapes. This can be very useful to create your own navigation packages that can be controlled from any device. Other useful tools are keyboardteleopjs, to move a robot using a simple keyboard interface, mjpegcanvasjs to visualize image topics, and speech_commands to control a robot using speech. Robot Web Tools also includes all necessary server nodes to interface the client-based modules with ROS. This nodes are rosbridge_server, web_video_server, and tf2_web_republisher.
All these tools can help to solve the problem of the isolation of ROS in Linux systems, and allows the deployment of ROS applications on any device that can use a web browser (Mozilla Firefox, Google Chrome, Safari, etc … ) In the future we can expect more development of the Robot Web Tools project, for example with the addition of new communication standards, like WebRTC, that will help with applications demanding intensive and high-bandwidth streaming.
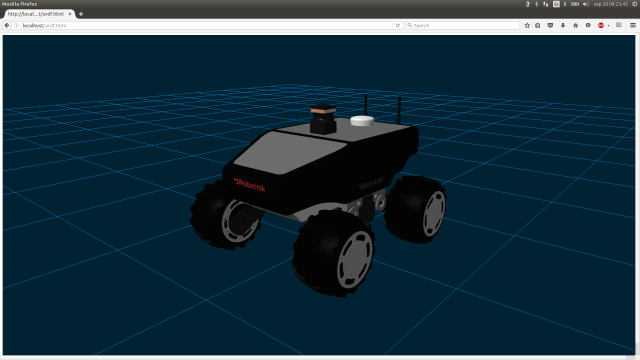
Illustration 1: SUMMIT XL Web 3D visualization
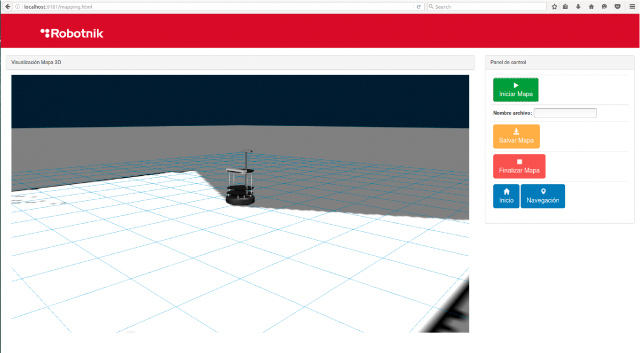
Illustration 2: Turtlebot web visualization
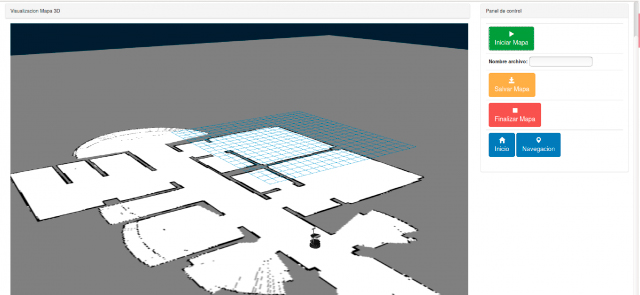
Illustration 3: Turtlebot web map navigation
- La robótica autónoma como infraestructura estratégica: el reto de inspeccionar y proteger sistemas críticos - 10 febrero 2026
- Robótica industrial en 2025: tendencias, cifras y perspectivas globales - 15 diciembre 2025
- Inteligencia Artificial para inspección autónoma basada en visión - 27 noviembre 2025