

Companies wishing to move towards automation are still uncertain about the technical details of such industrial implementations, or simply wondering what exactly robotics can do to improve their production processes.
The use of robotic transport platforms is more popular, but there is still a lack of knowledge about mobile handling robots.
Robots for material handling are a growing trend and Robotnik is one of the pioneers in the development and manufacture of these robots.
In this article you will find 5 applications of material handling robots that you may not have thought of yet.

What is a handling robot?
A traditional handling robot is a robotic arm installed and fixed in a specific location in a static way, for example, at a point on an assembly production conveyor to join several parts together.
Now, handling robots are reaching new horizons thanks to mobility and Collaborative Mobile Manipulation is already a reality.
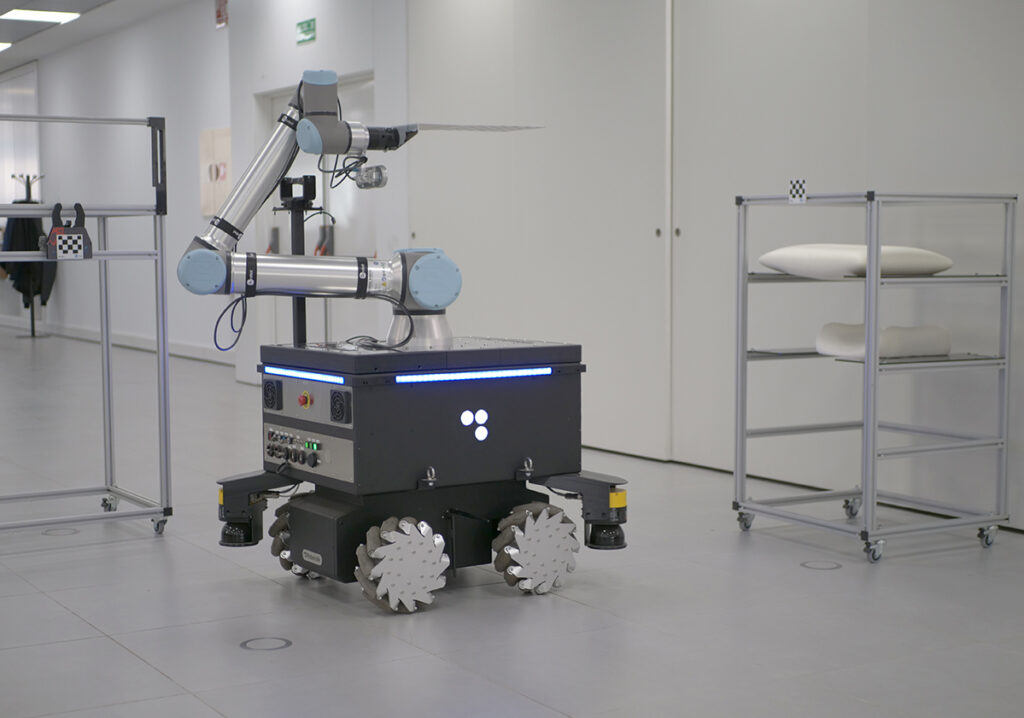
Therefore, a Collaborative Mobile Manipulator or handling robot, is a robotic arm seamlessly integrated into an autonomous mobile robotic platform. So the arm no longer has to be fixed at a single point but the arm can execute one or several handling tasks at as many locations as the company requires.
Robotnik’s experience after 20 years in the industry as a leading company in autonomous mobile handling, shows that there are a large number of tasks that no longer make sense to be performed by operators. These are risky, repetitive and time-consuming tasks that put unnecessary strain on the workers.

In addition, many of Robotnik’s customers are faced with the problem of a lack of skilled labour for these tasks.
For these reasons, the automation of mechanical and tedious operations for humans is continuously growing.
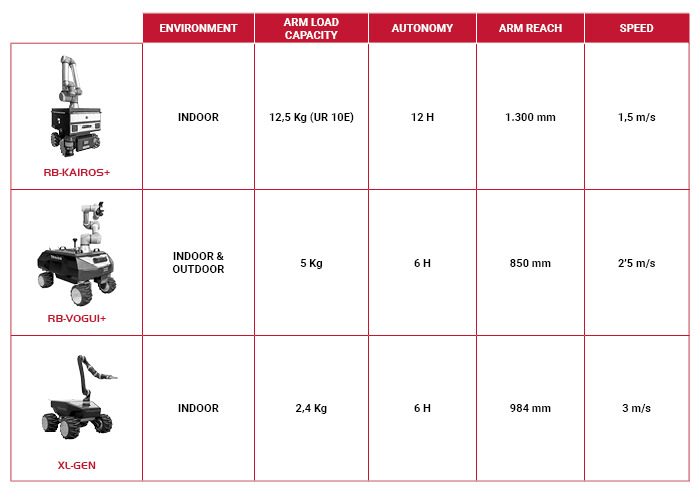
To enumerate, these are Robotnik’s most demanded Collaborative Mobile Manipulators for material handling:
5 robot applications for material handling
There are as many applications that mobile manipulators are capable of executing as there are end-effectors compatible with the arm. For example grippers, magnetic grippers, robotic hand grippers and a host of other component options.
Lastly, here is a list of five applications of handling robots that are common in industrial environments that you may not have known about:
-
Goods-to-person
This is the term used to describe the tasks of bringing parts or other units of material from a warehouse to the operator in an automated manner. Goods-to-person picking reduces unnecessary operator movements and avoids unproductive times.
-
Intralogistics
In production lines, it is common to find missing components required for manufacturing. A handling robot is able to supply each stage of the production line so that operators can continue with the process.
-
Handling
of hazardous material: the precision and advanced technology of a Mobile Handler robot such as RB-KAIROS+ makes it capable of handling toxic, polluting or noxious material that poses a danger to humans.
-
Palletising
loading materials onto a pallet is a mechanical task that requires precision and consistency. It is one of the most automated applications in logistics environments because the repeatability rate of a robot handler significantly exceeds that of a human operator. In the case of mobile handlers, the robot can carry out the palletising task at one point in the warehouse and when it is finished, it can move to the location of the next pallet to be loaded or stop, if it has completed its mission. Thus, it is not necessary to bring the pallets to the robotic arm, but the process is reversed: the robot goes autonomously to the pallet.
-
Sorting
the development of advanced software is key for the manipulator robot to carry out a sorting application accurately and with no margin for error. In fact, it is one of the slowest tasks to be automated due to its complexity. Now, the level of technological development has reached a point that enables and guarantees efficiency. A mobile handling robot can classify different elements following a specific order or pattern, by means of Artificial Intelligence algorithms and other identification, vision and sensorisation systems.
Sanding, welding, polishing… The list of applications that a mobile handling robot is able to perform is endless. What is the task that your company needs to automate? Robotnik’s team knows which Mobile Handling Robot best suits your needs.
- Autonomous Robotics as a Strategic Infrastructure: The Challenge of Inspecting and Protecting Critical Systems - 10 February 2026
- Industrial robotics in 2025: trends, figures, and global outlook - 15 December 2025
- Artificial Intelligence for vision-based autonomous inspection - 27 November 2025