

Intelligent Search And Rescue Teleoperation Robot System, es el nombre del proyecto que ha llevado a cabo un equipo de investigación de la Universidad Tecnológica de Beijing donde nuestra plataforma móvil, GUARDIAN, ha formado parte de su Torso móvil.
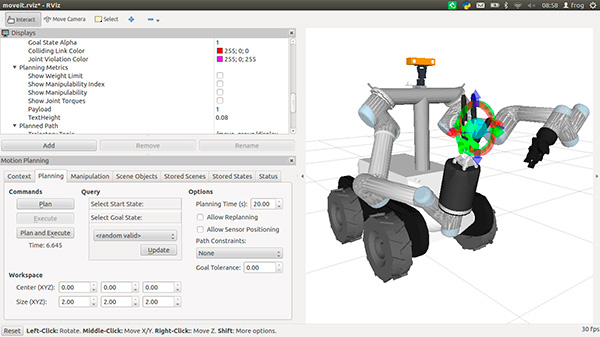
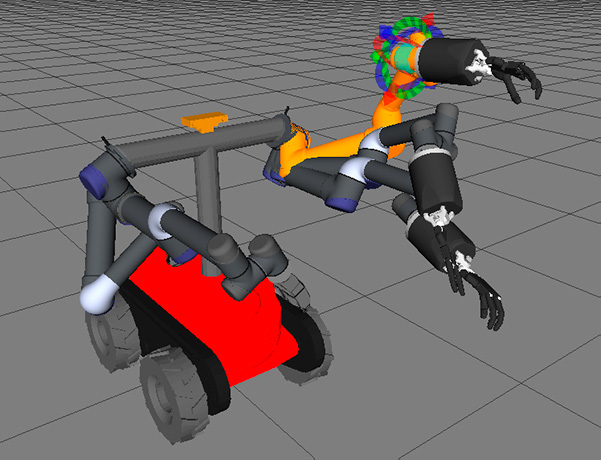
El torso integra varios productos tales como dos brazos UR5 robot, una Shadow Hand, una pinza y nuestra base móvil. Además, incluye una cámara estéreo y una camara PTZ. Todos sus componentes están basados en ROS.
Este sistema de manipulador puede navegar de forma remota a una ubicación específica y coger un objeto con su mano o pinza.

Últimas entradas de Robotnik (ver todo)
- La robótica autónoma como infraestructura estratégica: el reto de inspeccionar y proteger sistemas críticos - 10 febrero 2026
- Robótica industrial en 2025: tendencias, cifras y perspectivas globales - 15 diciembre 2025
- Inteligencia Artificial para inspección autónoma basada en visión - 27 noviembre 2025