

La Industria 4.0 y las fábricas inteligentes son un marco propicio para las empresas que se plantean crecer. El sector tecnológico, en concreto la robótica colaborativa, está en constante desarrollo para dar respuesta a los nuevos retos que presenta este contexto.
Nuevos retos
Como decía Ángel Soriano en esta entrevista, ‘uno de los desafíos principales a los que nos enfrentamos en el desarrollo de los proyectos de I+D son los entornos dinámicos e impredecibles. Es uno de los factores más críticos a la hora de ofrecer una solución aplicable a distintos escenarios o casos de uso’.
Frente a estos escenarios cambiantes y dinámicos, es necesario ofrecer la máxima seguridad para que robots y humanos puedan operar de forma eficaz y con todas las garantías.
Este post muestra cómo la velocidad se adapta al entorno para que el robot cumpla su misión lo más rápido posible manteniendo la seguridad del sistema.
Los AMR actuales son más potentes, más avanzados y más productivos, por lo que la seguridad se ha convertido en un elemento fundamental y en el reto clave para una colaboración eficaz con los operarios.
HR-RECYCLER es un proyecto H2020 de I+D que desarrolla una Planta híbrida de reciclaje humano-robot para el reciclaje de equipos eléctricos y electrónicos.
Robotnik, como proveedor de hardware, se encarga de desarrollar nuevos conceptos de UAV capaces de manejar material dentro de fábricas inteligentes y preprocesar materiales RAEE por procedimientos robóticos automáticos (categorización de dispositivos eléctricos/electrónicos, desmontaje, clasificación de los componentes del dispositivo, etc.).
La seguridad es la clave
Para Robotnik, como fabricante de robots con experiencia desde 2002, y dentro del entorno colaborativo del proyecto HR-RECYCLER, este aspecto es especialmente importante ya que humanos y robots trabajarán codo con codo.
En artículos anteriores se ha hablado de la importancia de la seguridad centrándose en el aspecto predictivo/anticipatorio, es decir, la señalización y cómo se implementa en los AMR. Además de esto, la seguridad también implica aspectos como evitar colisiones, la ralentización o la detención de los robots y la comodidad de los humanos cuando un robot móvil autónomo trabaja a su alrededor.
Pero, ¿cómo funciona esto realmente? ¿Cómo garantiza Robotnik la seguridad de sus robots?
Robotnik pretende garantizar la seguridad de sus robots mediante el cumplimiento de la norma EN ISO 3691-4:2020, relativa a Carretillas industriales – Requisitos de seguridad y verificación – Parte 4: Carretillas industriales sin conductor y sus sistemas.
Para el cumplimiento de la normativa y además de los reglamentos concretos de cada país, este ofrece al lector una breve descripción sobre qué, por qué y cómo se alcanzará el conjunto de premisas de la ISO relacionadas con el movimiento.
En primer lugar, el robot debe estar adecuadamente diseñado para permitir que el sistema reduzca la velocidad, detenga el movimiento o modifique su comportamiento en función de las condiciones ambientales, tal y como se recoge en la ISO mencionada anteriormente, los requisitos mínimos de hardware en cuanto a garantizar el movimiento son:
- Sistema de frenado: el robot necesita estar equipado con un sistema de frenado capaz de funcionar cuando el robot está apagado y también capaz de detener el sistema cuando los actuadores están fuera de control.
- Sistema de control de velocidad:el robot debe estar equipado con un sistema de control de velocidad para enviar una señal de parada en caso de exceso de velocidad. También tiene que estar alineado y ser compatible con la estabilidad de la plataforma.
- Sistema de control de la dirección: el robot necesita controlar el ángulo de dirección de los actuadores para controlar la estabilidad del robot.
- Dispositivos de protección y medidas complementarias: para detectar personas en los recorridos en modo automático, los robots deben estar equipados con sensores capaces de detectar personas y correctamente instalados para ello. Si estos dispositivos no pueden funcionar en el sentido del movimiento, la velocidad máxima debe ser inferior a 0,3 m/s.
Una vez que esta parte ya está instalada en el robot y correctamente integrada, la configuración y las áreas de control deben estar alineadas con las capacidades del robot. Para comprobar todos los componentes, los robots tienen instalado el módulo PLC seguro, un controlador de seguridad modular ajustable para aplicaciones de seguridad y el núcleo del proceso de supervisión. El nivel de seguridad realmente alcanzado viene determinado por el cableado externo, la forma en que se implementa el cableado, la configuración, la selección de los activadores de comandos y la forma en que están dispuestos en la máquina.
En los robots de Robotnik, el sentido del cableado y de la interacción es el siguiente:
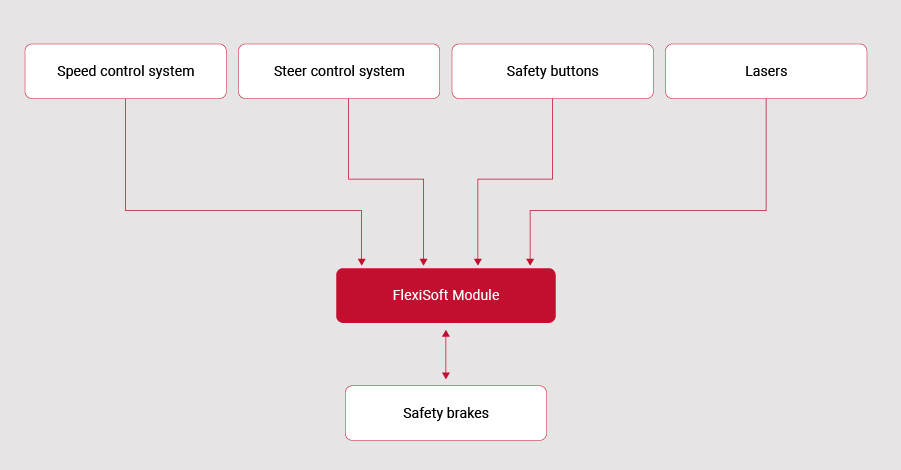
Configuración
El PLC seguro se comunica con los frenos electromecánicos para activar la seguridad y detener o reducir la velocidad del robot. La configuración depende del diseño, la función y el área de trabajo del robot. Si el personal puede acceder a la trayectoria de la lanzadera, deben implementarse ciertas condiciones de seguridad de acuerdo con las normas aplicables, por lo que el robot debe ser capaz de actualizar este nivel de seguridad en tiempo real:
- Áreas láser. Los escáneres láser utilizados pueden conmutar entre dos tipos de áreas: el área de advertencia, donde el robot reduce su velocidad máxima como prevención; y el campo de protección, donde el robot detiene su comportamiento si algo le cierra el paso. Ambos campos están configurados para aumentar proporcionalmente a la velocidad. La distancia mínima del campo de protección para el límite de velocidad máxima más bajo es de 0,3 m.
- Límite de velocidad: los límites de velocidad se incluyen como una de las condiciones en la ISO para garantizar que el robot podrá detenerse antes de chocar y con una distancia restante, los límites también pueden reducirse para mejorar la estabilidad de la base o la carga. La velocidad máxima permitida debe ser inferior a 0,3 m/s si los sistemas de detección de personal (es decir, los escáneres láser) están silenciados y sólo pueden ser utilizados por los trabajadores especializados. Si el robot no trabaja cerca de las personas y tiene un gran espacio para trabajar, la velocidad máxima es de 1,2 m/s con el sistema de detección de personal activo. En la siguiente tabla se resumen todos los casos posibles de velocidad:

- Ángulo de dirección: la dirección del movimiento es también uno de los condicionantes ya que la estabilidad puede verse afectada o el robot puede tener zonas no cubiertas por la seguridad.
Configuración específica
En el marco del proyecto se diseñaron dos tipos de robots: el RB-KAIROS+ que es una plataforma omnidireccional montada con un manipulador, y el RB-ARES, que es una transpaleta robotizada.
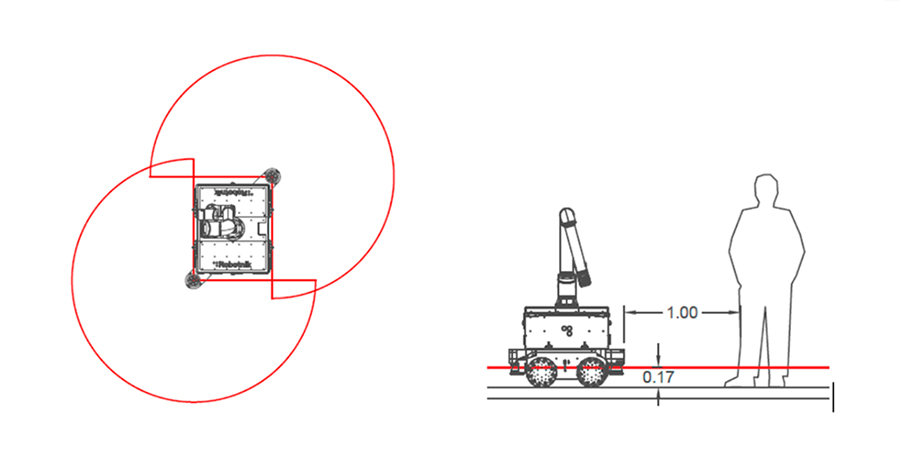
La configuración del RB-KAIROS+ cuenta con frenos de seguridad, dos botones de emergencia accesibles, un sistema de monitorización de la tracción en cada rueda y dos láseres 2D instalados y situados en dos de sus esquinas. Los escáneres proporcionan al robot un rango de visión de 360º de su entorno. El rango de visión detecta cualquier obstáculo situado a una altura de 170 mm del suelo, que es la altura recomendada para detectar las piernas del personal.
El RB- KAIROS + está configurado, de serie, para activar la parada de emergencia al detectar un obstáculo a una distancia de 1.000 mm. Esta configuración puede ser modificada en función del entorno o de la aplicación a realizar, siempre que no comprometa la seguridad de los usuarios.
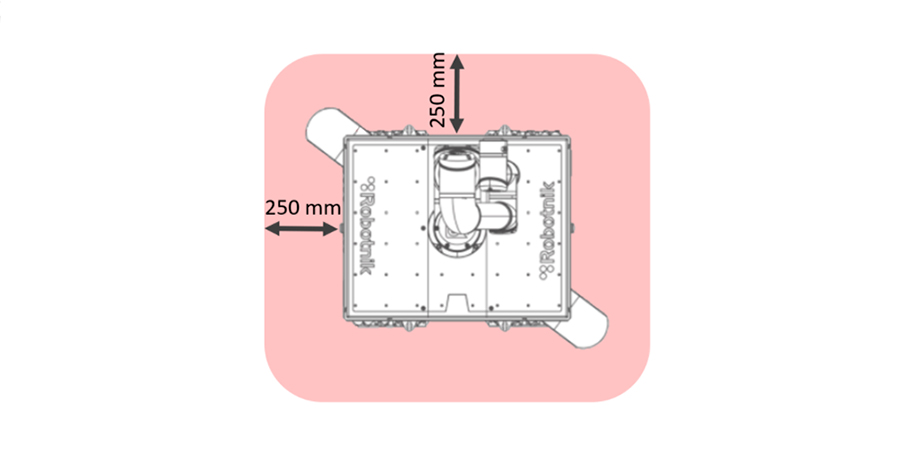
El robot tiene una zona de seguridad predefinida en el plano horizontal, determinada por la detección de láseres de seguridad. Cuando se detecta un obstáculo o una persona dentro de la zona de seguridad, el RB-KAIROS+ se detiene hasta que la zona vuelve a estar libre. El tamaño de la zona de seguridad depende de la velocidad de la base móvil.
Cuando la base está estática o tiene una velocidad inferior a 0,15 m/s, la zona de seguridad es la que se detalla en el siguiente esquema:
Esta superficie aumenta con la velocidad de la base móvil hasta alcanzar las dimensiones máximas con una velocidad de 1m/s:
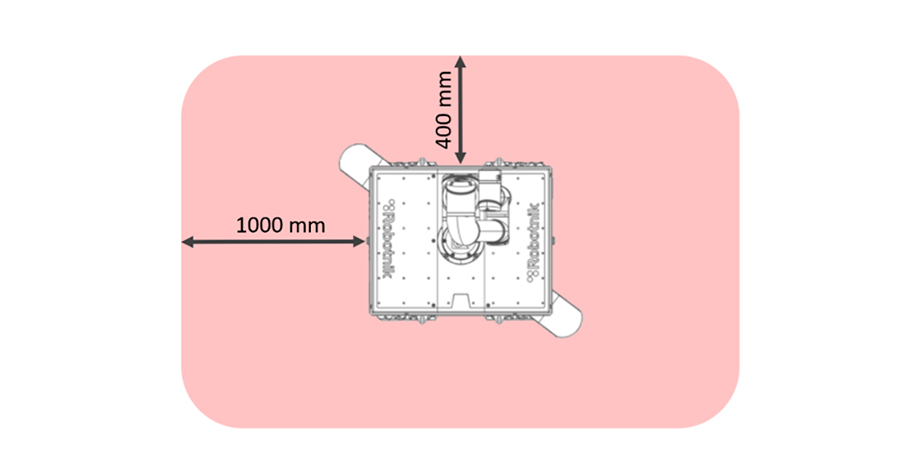
Una vez alcanzada la velocidad máxima de 1,3m/s, la plataforma se detiene por razones de seguridad.
En el caso de la transpaleta, está configurada con los frenos de seguridad, el sistema de control de la dirección y la tracción y un único láser 2D instalado y situado en la parte delantera, que le confiere un rango de visión de 270º. El rango de visión detecta cualquier obstáculo situado a una altura de 170 mm del suelo y está configurado para activar la parada de emergencia al detectar un obstáculo a una distancia de 250 mm.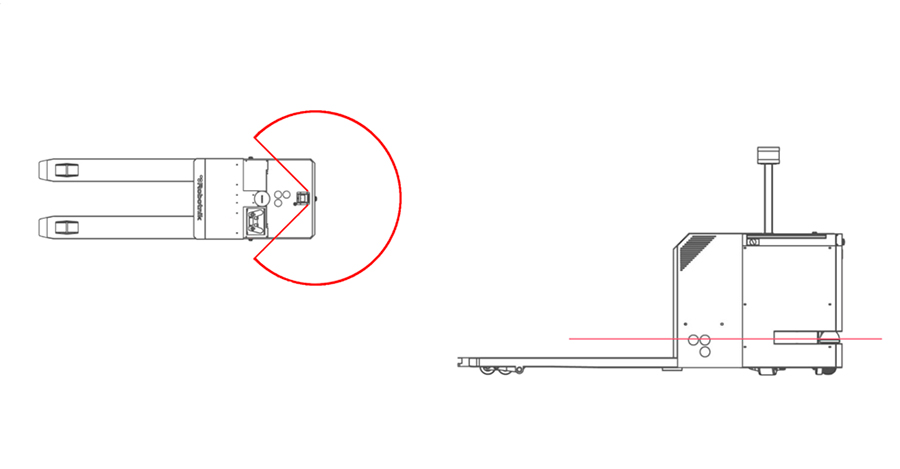
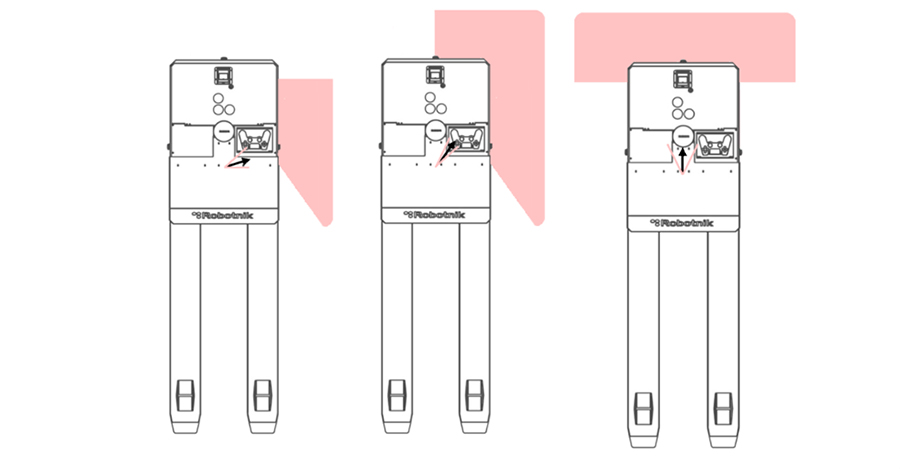
El robot tiene una zona de seguridad predefinida en el plano horizontal, determinada por la detección láser de seguridad. El tamaño de la zona de seguridad depende del vector de velocidad de la base móvil, es decir, de su módulo, sentido y dirección de movimiento. Se definen varias regiones pequeñas y sólo se activan las que están en la dirección y sentido del vector de movimiento.
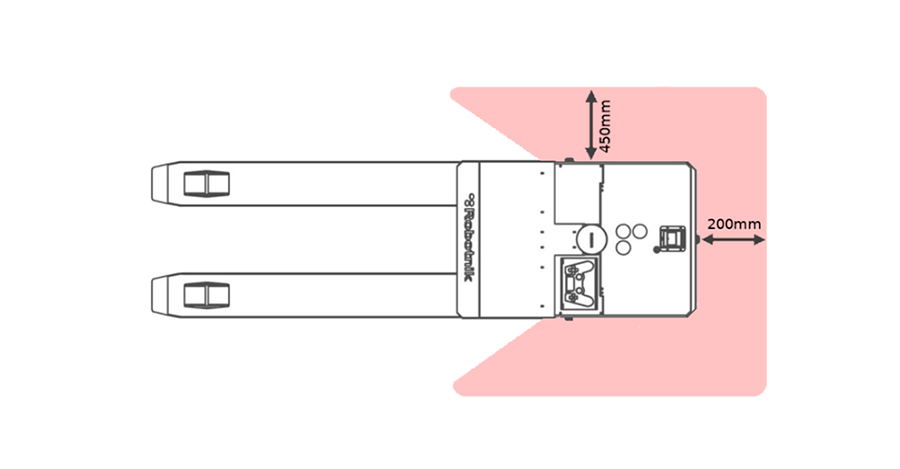
Cuando la base es estática o tiene una velocidad inferior a 0,15 m/s, la zona de seguridad es la que se detalla en el siguiente esquema:
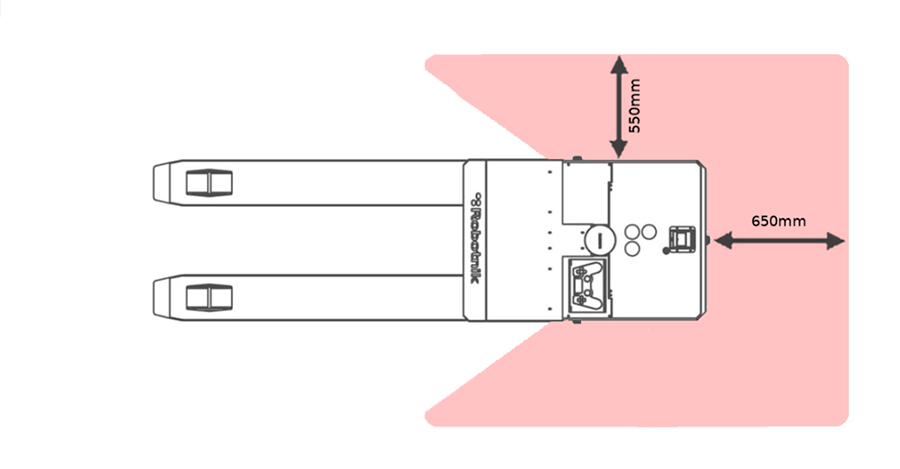
Esta superficie aumenta con la velocidad de la base móvil hasta alcanzar las dimensiones máximas con una velocidad de 1,2 m/s:
 Conclusiones
Conclusiones
 Conclusiones
ConclusionesLa seguridad es una parte crucial que hay que tener en cuenta a la hora de diseñar un AMR que trabaje en un escenario colaborativo entre humanos y robots. Dentro del diseño de soluciones robóticas, Robotnik trabaja para conseguir una sinergia total entre los componentes para construir y desarrollar robots capaces de trabajar de forma segura entre humanos y que, al mismo tiempo, representen una solución eficiente y rentable para la empresa que apuesta por la implantación de la robótica.