

¿Qué es exactamente un robot manipulador? ¿Cuáles son realmente los beneficios de los manipuladores móviles?
La robótica y la manipulación móvil van en una rueda que no para de girar, avanzando para adaptarse cada vez mejor a las necesidades de los usuarios. Robotnik ha sido pionero en el diseño y desarrollo de manipuladores móviles autónomos que, en definitiva, son una evolución natural surgida de la unión de cobots y AMR.
Este artículo aclara cuestiones como qué es un manipulador en robótica, cuáles son las ventajas de los manipuladores móviles de Robotnik y otras cuestiones de interés.
Lo que hace unos años eran robots fijos, evolucionaron hacia robots colaborativos y ahora Robotnik ya está diseñando y fabricando robots móviles flexibles más cognitivos, sensibles y más seguros que llevan a la industria de la mano hacia la cuarta revolución industrial.
Como empresa de robótica fundada en 2002, Robotnik tiene una gran experiencia en manipulación móvil autónoma y mantiene relaciones comerciales con compañías referentes como Universal Robots, Schunk, Kinova o Senserbot.
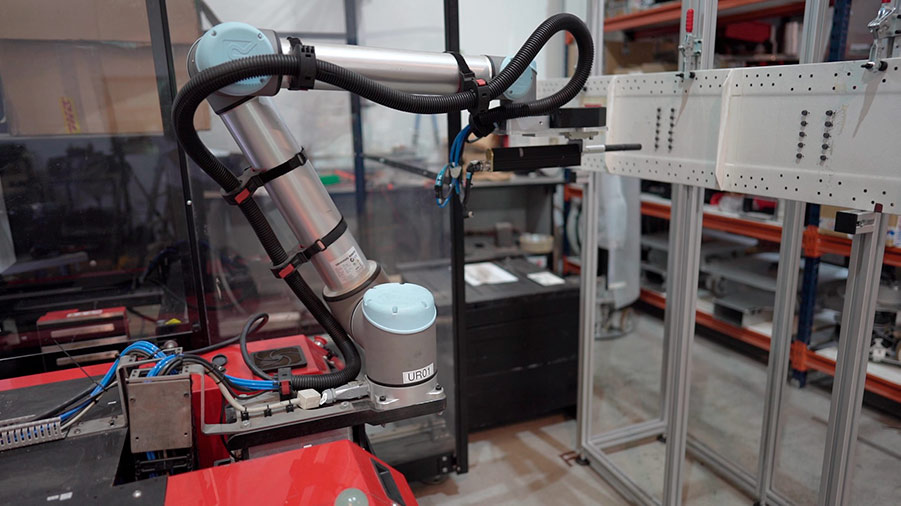
Un ejemplo de integración de manipulación móvil en industria es uno de los recientes casos de éxito de Robotnik, basado en una implementación industrial en la compañía neerlandesa de producción de engranajes Hankamp Gears BV. En el mismo, aparece como protagonista el manipulador móvil autónomo más vendido de Robotnik: el RB-KAIROS+, del que después se habla con más detalle.

¿Qué es un robot manipulador móvil autónomo?
Un robot manipulador es básicamente, un robot que integra un brazo manipulador robótico en una plataforma móvil, aunando en un único producto las ventajas que ofrecen ambos sistemas: la precisión, destreza y flexibilidad de uno, y la autonomía y movilidad del otro.
La manipulación móvil colaborativa es ya una realidad al alcance de todas las empresas que compiten en el marco de la industria 4.0. Se trata de manipuladores móviles autónomos preparados para trabajar con seguridad en entornos donde hay personas. Su capacidad para realizar tareas mecánicas y repetitivas, cubriendo turnos de trabajo completos, los convierten en herramientas fundamentales para cualquier industria que desee posicionarse a la vanguardia tecnológica y ocupar un puesto de relevancia en el mercado actual.
Aplicaciones de manipulación móvil en la industria
- Manipulación – Pick & Place
- Carga / posicionado
- Montaje
- Ensamblaje
- Atornillado, taladrado…
- Inspección y verificación
Ventajas de los manipuladores móviles de Robotnik
En el portfolio de la empresa se encuentran robots de manipulación móvil para aplicaciones industriales y para I+D como el RB-VOGUI+, XL-GEN o el RB-KAIROS+.
Algunas de las ventajas de los manipuladores móviles de Robotnik:
- Fácil configuración e instalación, adaptándose a las necesidades de cada cliente, con un software y hardware abierto.
- Colaborativos: los manipuladores móviles colaborativos son perfectos para compartir espacio de trabajo con personas con total seguridad.
- SGF (Sistema de Gestión de Flota) para hacer posible la coordinación de una flota de robots que comparten el mismo espacio de trabajo y recursos.
- HMI (Interfaz de Usuario Avanzada) para generar mapas y redefinir rutas y puntos de referencia.
- Autonomía: su actividad complementa o sustituye, en caso de ser necesario, a la realizada por cualquier trabajador durante 1 o más turnos.
- Movimiento omnidireccional que permite la reducción de tiempos, haciendo que sea 1/5 veces más rápido que uno diferencial.
- Navegación libre frente a las rutas fijas propias de los AGVS tradicionales.
- Funciones inteligentes avanzadas como el seguimiento de personas, el acoplamiento a maquinaria o comunicación por voz, entre otros.
Dentro del portfolio de manipuladores móviles de Robotnik, hay un modelo que destaca.
RB-KAIROS+: el manipulador móvil más demandado de Robotnik
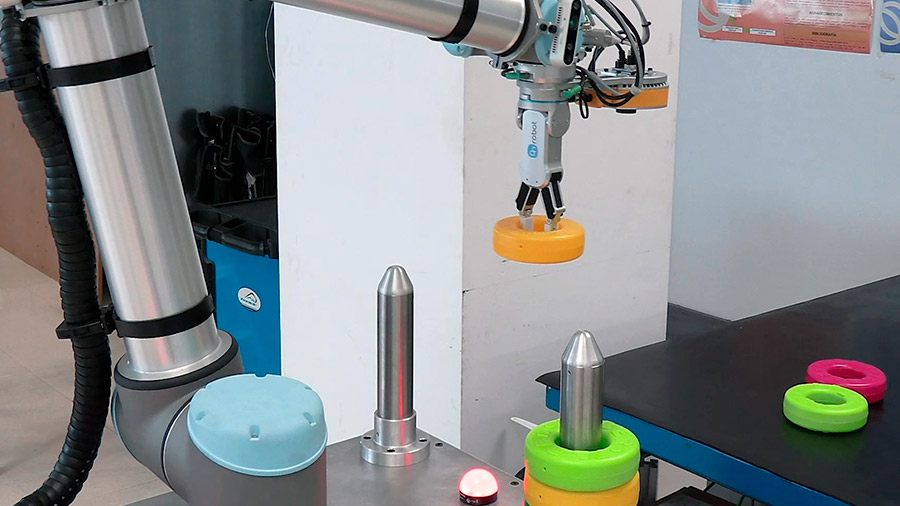
Este innovador manipulador móvil colaborativo está especialmente diseñado para el desarrollo de aplicaciones industriales. RB-KAIROS+ es el robot para la logística y la manipulación móvil industrial, para Pick&Place, Fetch & Carry, Machine Tending u operaciones sobre piezas de gran tamaño, entre otras.

Ventajas competitivas del RB-KAIROS +:
Además de contar con todas las ventajas que se nombran en el punto anterior, comunes a todos los manipuladores móviles de la cartera de Robotnik, estas son algunos de los beneficios que los clientes del RB-KAIROS+ han destacado tras su uso:
- Versatilidad, mayor rentabilidad y mejora en los procesos productivos debido a las posibilidades de integrar la totalidad de los brazos de la e-Serie de UR con la plataforma móvil autónoma.
El AMR está certificado por UR+, preparado para la integración de un brazo UR e-Series.
Universal Robots es uno de los gigantes en fabricación de brazos robóticos colaborativos. Sus cobots son seguros, flexibles y fáciles de usar, por lo que la sinergia entre ambas empresas, ha permitido desarrollar el manipulador móvil más demandado de Robotnik: el RB-KAIROS+. - Fácil de configurar y adaptable: El software y hardware abierto en ROS, implica una puesta en marcha mucho más sencilla que la de otros manipuladores móviles. Esto convierte el brazo robótico en un manipulador móvil de forma intuitiva.
- Mayor eficiencia en tareas como pick&place. Al poder soportar una carga útil de hasta 250 kg, aporta valor en el manejo de cargas pesadas y en la automatización de las tareas de almacenamiento.
- Colaborativo: Este manipulador móvil es completamente autónomo y permite que el brazo robótico trabaje en distintas localizaciones, ampliando su área de trabajo, por lo que es perfecto para compartir el espacio de trabajo y tareas con humanos.
¿Incorporar manipulación móvil a tu planta industrial?
En los últimos años ha crecido considerablemente el número de industrias que automatizan sus líneas de producción incorporando uno o varios manipuladores móviles en su planta.
Para encontrar la solución que mejor se adapte a sus necesidades concretas, Robotnik dispone de un servicio de consulta sin compromiso en el que los profesionales le asesoran personalmente.
En cualquier caso, hay algunos aspectos clave que puede tener en cuenta para valorar la viabilidad antes de decidir:
- ¿Cómo es su entorno?
Un entorno de trabajo puede ser estructurado o no estructurado.
Por estructurado se entiende que el robot no encontrará muchos obstáculos inesperados a su alrededor, es decir, que no habrá modificaciones en el trazado para que el robot mantenga los puntos de referencia que le permiten ubicarse.
Si es no estructurado, únicamente con que se mantenga en torno al 20% los puntos de referencia, el robot será capaz de sortear los obstáculos dinámicos, es decir, inesperados. Cuando los detecte, reconducirá su ruta de forma inteligente asegurando la seguridad y la rentabilidad del tiempo de trabajo. - ¿Qué características debe tener el edificio?
El suelo es un aspecto muy importante a tener en cuenta, ya que los suelos irregulares afectan a la precisión de la odometría y a las vibraciones generadas por la medición láser. Además, las ruedas mecánicas pueden tener algunas limitaciones en algunos entornos: suelos aceitosos o grasientos, suelos con mucha suciedad, con arenilla o asperezas.
Las paredes y las estanterías son importantes para que el robot navegue por el suelo, localizando y mapeando simultáneamente. Los manipuladores móviles de Robotnik las tomarán como referencia y, una variación no superior al 20% respecto a la disposición original, no afectará al rendimiento del robot.
El primer día se pasea el robot por el lugar, moviéndolo de manera teleoperada con un mando a distancia y generando una ruta real que será la base de la futura navegación del robot.
Aspectos como las dimensiones de los pasillos o la altura de las puertas deben adecuarse a la huella del robot. Las ruedas omnidireccionales son otra de las grandes ventajas del manipulador móvil de Robotnik por su versatilidad de 360º, especialmente para aplicaciones industriales en las que el robot puede moverse fácilmente en pasillos pequeños, por ejemplo. - ¿Cuánta precisión requiere su aplicación?
Por defecto, la precisión de posición proporcionada por el LiDAR para la navegación SLAM es de unos 5 a 10 cm. Esta precisión puede ser suficiente para una aplicación normal en la que el robot simplemente transita del punto A al punto B o va a varios puntos de espera. Pero para aplicaciones específicas como Pick&Place o la interacción con otra maquinaria, esta precisión puede mejorarse hasta 1 mm.
Esto se consigue añadiendo sensores o códigos QR. Así se hace, por ejemplo, para el acoplamiento: añadimos un código que la cámara reconoce y es capaz de reubicar. - ¿Cuánta carga útil necesita llevar?
Cada manipulador móvil de Robotnik tiene una capacidad de carga distinta, para que pueda encontrar la mejor opción de robot en función de la carga que requiera su caso.
En concreto, la configuración estándar de RB-KAIROS+, tiene una carga útil de hasta 250 kg. Además, dispone de otras versiones con brazos colaborativos de 3 Kg., 5 Kg. y 16 Kg. de carga útil. - ¿Cómo se establecen los turnos de trabajo?
Uno de los grandes beneficios de los manipuladores móviles de Robotnik es que, con la flota de robots adecuada -optimizada en número de unidades- se pueden trabajar turnos completos de 24 horas. Los robots realizarán cargas automáticas de la batería cuando sea necesario. El robot está equipado con una estación de carga a la que se puede conectar de forma autónoma. Es posible ordenar al robot que realice una acción de carga, que lance un terminal, que lance de forma inalámbrica, que lance un protocolo industrial como descanso o también que lance la interfaz poliscope de Universal Robots.
La manipulación móvil supone un impulso definitivo en el camino hacia la Industria 4.0, también conocida como industria conectada.
El uso de manipuladores móviles promueve la automatización industrial flexible e inteligente que aumenta la competitividad de una fábrica gracias al mejor uso de sus recursos.
Robotnik apuesta no solo por la automatización, sino por la automatización inteligente que pasa por desarrollar robots móviles capaces de autogestionarse y tomar decisiones sin intervención humana.
- La robótica autónoma como infraestructura estratégica: el reto de inspeccionar y proteger sistemas críticos - 10 febrero 2026
- Robótica industrial en 2025: tendencias, cifras y perspectivas globales - 15 diciembre 2025
- Inteligencia Artificial para inspección autónoma basada en visión - 27 noviembre 2025