

Los robots colaborativos han pasado a primer plano en la escena internacional al generalizarse la Industria 4.0. Hoy tenemos robots más potentes, más avanzados y más productivos, por lo que la combinación robots móviles y seguridad es un elemento clave.
La seguridad es la clave
Para Robotnik, como fabricante de robots con amplia experiencia y dentro del entorno colaborativo del proyecto HR-Recycler, este aspecto es especialmente importante ya que humanos y robots trabajarán codo con codo. La solución propuesta para transportar materiales dentro de una fábrica tiene que hacerse de forma segura.
Para este proyecto, los robots diseñados son el RB-KAIROS+ (manipulador móvil) y el RB-ARES (transpaleta). Es realmente importante cómo los robots móviles mostrarán la intención de movimiento, elevación o manipulación.

Para garantizar el correcto funcionamiento en el complejo marco de este proyecto, Robotnik ha dotado a sus robots de sensores y señalizadores que permiten al robot proceder con seguridad y mostrar sus objetivos de forma anticipada.
Los fabricantes pueden introducir medidas de seguridad en sus operaciones automatizadas de varias maneras. El tipo y la complejidad de estas medidas variarán según la aplicación robótica.
Para garantizar la máxima seguridad, existen ciertas reglas y normas de seguridad que estos robots colaborativos deben cumplir. En Europa se encuentran en la norma EN ISO 3691-4:2020 e ISO 12100:2010 6.4.3.

Aplicación de la normativa ISO
Este post pretende dar al lector una breve descripción sobre qué implica y como se aplica esta normativa.
En primer lugar, ¿qué incluye la normativa ISO? La normativa sobre sistemas de alerta dice:
- Cuando se inicie cualquier movimiento después de un estado de parada de más de 10 segundos, se activará una señal de aviso visible o acústica durante al menos 2 segundos antes del inicio del movimiento.
- Durante cualquier movimiento se activará una señal de aviso visible o acústica.
Si los medios de detección humana están activos, la señal será diferente. - Cuando los robots cambien su dirección desde una trayectoria recta, se dará una indicación visible de la dirección que debe tomar antes de que cambie la dirección en caso de que el robot se conduzca de forma autónoma.
- Cuando el elevador esté activo, deberá haber una señalización especial.
La solución propuesta es un software de dos pasos que gestionará las señales del robot, explicado a continuación tras el diagrama y en las celdas rojas:

El robot_local_control es un nodo gestor que tiene información sobre el estado de todo el robot: estado del elevador, meta activa, misión terminada, etc. A la derecha, un grupo de nodos que gestiona el movimiento del robot con un nivel de prioridad:
- Robotnik_pad_node: El trabajador utiliza un pad PS4 para controlar el robot y este nodo transmitirá las órdenes (modo no autónomo).
- Nodos de planificación de rutas: de igual manera que Move_base, controla el robot (modo autónomo).
Robotnik ha instalado en sus robots móviles dos formas de alertar a los usuarios de las instalaciones: dispositivos acústicos o indicadores luminosos a través de acoustic_safety_driver y leds_driver.

Como se puede ver, hay dos pasos para unir las partes superior e inferior, un nodo para transformar el movimiento en señales para mostrar la intención del robot y otro para orquestar los dos tipos de señales y gestionar los requisitos de la normativa.
Un controlador de señales de giro está destinado a resolver el primer y el cuarto requisito de la normativa en función del modo del robot (autónomo o no autónomo).
En modo no autónomo, y como dice la norma, el movimiento depende de un personal debidamente autorizado y formado por lo que basta con mostrar que el robot se mueve leyendo la orden de movimiento y comprobando la velocidad aplicada.
En modo autónomo el robot navega hacia un punto de destino a través de una trayectoria calculada por el planificador, además gestiona el AMR para evitar obstáculos de forma dinámica y por ello es importante alertar a los trabajadores en todo momento.
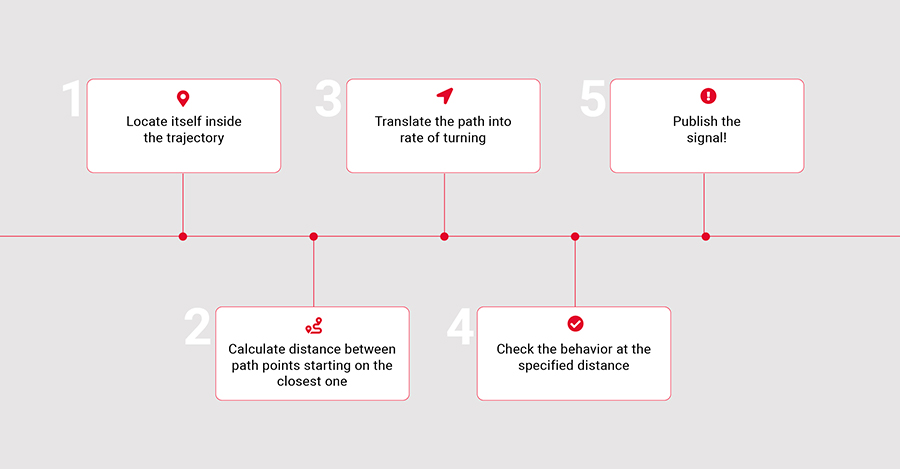
¿Cuál es el proceso?
Esta es una breve descripción de la función, que tiene en cuenta el plan y recalcula al mismo tiempo que el planificador para poder mostrar la predicción más actualizada del movimiento.
Por último, el robot_signal_manager pretende resolver el resto de problemas ya que tiene acceso al estado del robot, muestra una señal luminosa o una señal acústica 2 segundos antes del movimiento, da prioridad a las señales de emergencia (en consonancia con el comportamiento del robot, las señales rojas significan que el robot se detendrá) y las señales que no son exclusivas se muestran mediante balizas o señales acústicas.

La zona ocupada es una de las señales no exclusivas. Los robots tienen unas balizas extra que parpadean en rojo cuando hay algo en la zona de protección (cerca del área de movimiento del robot, de la zona crítica) y en amarillo se indica cuando hay algo en la zona de advertencia (cerca de la zona de protección).
Resumiendo
La seguridad no sólo consiste en detener el robot o evitar un choque cuando se produce la colaboración entre humanos y robots. Con el desarrollo de estos nodos, Robotnik pretende no sólo disminuir la probabilidad de accidente o cumplir con las premisas de la ISO de seguridad, sino también ayudar a los trabajadores a sentirse más cómodos con las decisiones del robot móvil y acercar la colaboración humano-robot, mostrando señales claras sobre la actuación del robot.
- La robótica autónoma como infraestructura estratégica: el reto de inspeccionar y proteger sistemas críticos - 10 febrero 2026
- Robótica industrial en 2025: tendencias, cifras y perspectivas globales - 15 diciembre 2025
- Inteligencia Artificial para inspección autónoma basada en visión - 27 noviembre 2025