


Robots salvarán a los campos del peligro de los pesticidas
Los futuros robots rociarían pesticidas solo a las plantas que los necesitan, a diferencia de las prácticas actuales…

TU Dortmund acoge una exitosa demostración de los RB-1 Base
La ministra alemana de Educación e Investigación, Prof. Dra. Wanka, ha visitado recientemente el nuevo laboratorio de…

Robótica de servicio en entornos asistenciales
A través del programa Horizonte 2020, la Comisión Europea está tratando de fomentar el liderazgo en tecnologías…

BADGER, el robot subterráneo y autónomo
Robotnik participa en el proyecto BADGER, cuyo objetivo es el diseño y desarrollo de un sistema robótico subterráneo…
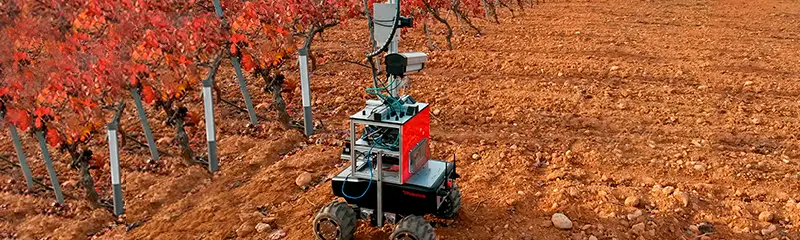
La viticultura de precisión da un paso más gracias al proyecto Vinbot
El proyecto europeo VINBOT, basado en la viticultura de precisión, acaba de finalizar después de tres años de intenso…

Radio Project Eu progresa en el programa de vida cotidiana asistida por el entorno
Nuevo encuentro de partners del RADIO Project en Nafpaktos, Greece. Los grupos hacen sus pruebas en el nuevo…

INJEROBOTS para la solución de problemas de cultivo en el injerto de semillas
INJEROBOTS es un proyecto innovador para la automatización del injerto de semillas de plantas. El proyecto europeo…
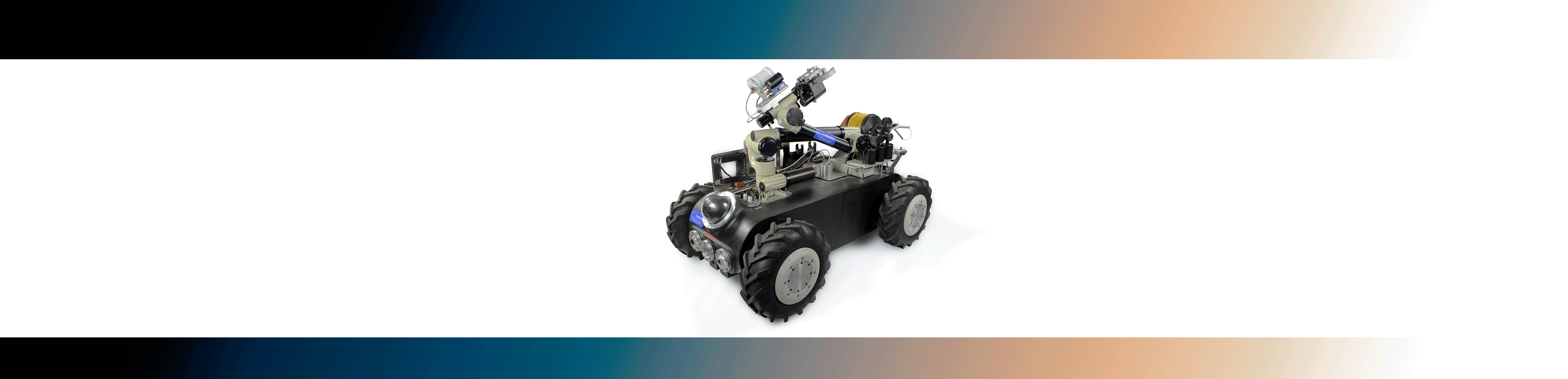
Robotics in Harsh Environments
In the field of hostile conditions, space is often considered as the harsh environment at its height. However, it’s not…
BOTS2REC, sistema robótico para la eliminación automática de contaminación por amianto.
El proyecto Bots2ReC es un sistema robótico que consiste en la eliminación automática de contaminación por amianto…

GoCart, Robot Autónomo de Transporte de Comida para personas con discapacidades
GoCart es un robot autónomo de transporte de comida diseñado por la compañía sur coreana Yujin Robot. El objetivo de…