


Service robotics within assisted living environments
By means of the Horizon 2020 programme for research and innovation, the European Commision is trying to build…

Radio Project Eu progresses in Ambient Assisted Living
RADIO Project technical partners hold meeting in Nafpaktos, Greece. Teams are checking progress in the new ambient…

SUMMIT XL STEEL in action
SUMMIT-XL STEEL is a mobile robotic platform for application development (logistics, indoor transport, surveillance,…

Robotnik obtains the Innovative SME Seal from the Economy Ministry
This recongnition shows the innovative philosophy of the company The Spanish Ministry of Economy and Competitiveness…
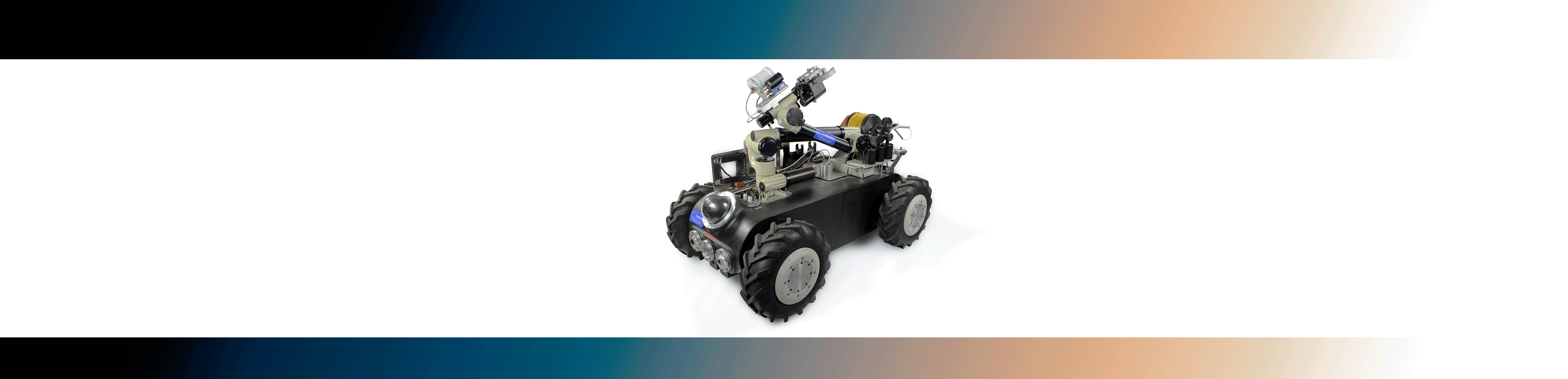
Robotics in Harsh Environments
In the field of hostile conditions, space is often considered as the harsh environment at its height. However, it’s not…
BOTS2REC, robotic system for the automated removal of asbestos contamination
Bots2Rec project is a robotic system used for the automated removal of asbestos contamination. It will consist of…

SUMMIT XL STEEL: Steel resistance
Robotnik has officially launched its mobile platform SUMMIT-XL STEEL. This is the new member of the family SUMMIT XL,…

Successful balance of the Global Robot Expo 2016
Robotnik showed its extensive portfolio of Service Robotics in Global Robot Expo 2016 Robotnik attended the Global…

Robotnik will attend the Global Robot Expo
The Global Robot Expo, one of the biggest events of robotic technology in Europe, will be held the next 28th, 29th,…

Robotnik receives the FEVES award for its business trajectory
FEVES, Valencian Federation of Social Economy Enterprises, presented the Business Trajectory award to Robotnik…